Vaizdų atpažinimo sistemos projektavimas ir tyrimas.
|
|
|
- Karolina Butkus
- prieš 3 metus
- Peržiūrų:
Transkriptas
1 KAUNO TECHNOLOGIJOS UNIVERSITETAS INFORMATIKOS FAKULTETAS PROGRAMŲ INŽINERIJOS KATEDRA Vytautas Jonutis Mindaugas Jaraminas Vaizdų atpažinimo sistemos projektavimas ir tyrimas. MAGISTRO BAIGIAMASIS DARBAS Darbo vadovas: prof. E. Bareiša Kaunas 2008
2 KAUNO TECHNOLOGIJOS UNIVERSITETAS INFORMATIKOS FAKULTETAS PROGRAMŲ INŽINERIJOS KATEDRA Vaizdų atpažinimo sistemos projektavimas ir tyrimas. MAGISTRO BAIGIAMASIS DARBAS Recenzentas: doc. dr. A. Riškus 2008 m. gegužė 22 d. Vadovas: prof. E. Bareiša 2008 m. gegužė 22 d. Atliko: IFM-2/5 grupės studentai Vytautas Jonutis Mindaugas Jaraminas 2008 m. gegužė 22 d. Kaunas
3 Turinys 1 Įvadas Dokumento paskirtis Santrauka Analitinė dalis Vaizdų apdorojimo sistemos analitinė dalis Trimačių skenerių apžvalga D skanerių sistemų apžvalga D skanerių pritaikymo sritys Robotų valdymas pagal trimačius vaizdus Pramoninių 3D sistemų analizė C ++ kalbos analizė SystemC analizė SystemC (TLM) transakcijų lygio modeliavimas TLM kalba Transakcijų lygio modeliavimo sritys ir pritaikymo galimybės RTL sintezės taisyklės Projektavimo įrankiai Projektavimo metodika SystemC komponentai Moduliai ir sąsajos Įvykiai, jautrumo sąrašas, pranešimai Aparatūros aprašymo kalbų vieta projektavimo procese TLM taikymas automatinam verifikavimui Funkciniai reikalavimai Nefunkciniai reikalavimai Projektinė dalis Bendros perėjimo tarp C++ ir SystemC (TLM ir RTL) taisyklės C++ modelio transformacija į sisteminį modelį Atskirų modelio dalių diagramos Eksperimentinė dalis Eksperimentų rezultatai Testinio vaizdo filtravimo rezultatai Kreivės radimo algoritmo rezultatai Interpoliacijos algoritmo rezultatai Sintezės rezultatai Pradinės specifikacijos palyginimas su eksperimento rezultatais TLM modelio rezultatai Išvados Žodynėlis Literatūra Priedai
4 Summary In this work we analyzing video preprocessing system model. Primary model specifications are described in functional level. It is hard to decide what system architecture should be, so we used SystemC TLM modeling language, because it gives us easier way to change system architecture Using SystemC transaction level modeling (TLM) the functional primary specification are transformed from functional model to system level. To get synthesizable model we use primary specification and TLM model. We solve many system architecture problems while we where working on primary model transformation to high abstraction system. Transforming high abstraction level model to SystemC synthesizable code we solve variables selection problems and algorithms conversation problem. 3
5 1 Įvadas 1.1 Dokumento paskirtis Šis dokumentas yra vienlusčių sistemų baigiamasis darbas. Tyrimo objektas yra vaizdo apdorojimo sistema, kurioje naudojamas trimatis skaneris. Darbe yra analizuojami skirtingo abstrakcijos lygio modeliai ir nagrinėjamas modelio transformavimo kelias į sisteminį lygį. Aprašoma analizė TLM ir RTL modeliais. Abu esame atsakingi už pradinio funkcinio modelio parinkimą, algoritmų analizę. Mindaugas yra atsakingas už modelio aprašymą aukštame abstrakcijos lygyje, bei sistemos architektūros parinkimą. Vytautas analizuoja aukšto abstrakcijos lygio modelio transformavimą į sintezuojamą modelį. Rezultatuose pateikiami gauti modeliavimo ir sintezės rezultatai. 1.2 Santrauka Darbe analizuojamas vaizdo apdorojimo sistemos modelis, kuris yra modeliuojamas. Pradinė modelio specifikacija yra aprašoma funkciniame lygyje. Modelio architektūrai modeliuoti mes naudojame transakcijų lygio SystemC, naudodamiesi ja mes galime greitai ir patogiai nustatyti, kokia turėtų būti modeliuojamos sistemos architektūra. Funkcinis modelis yra transformuojamas į sisteminį lygį naudojantis SystemC transakcijų modeliavimo kalba. Naudojantis pradine specifikacija ir TLM modeliu pereiname prie sintezuojamo aprašo. Transformuodami pradinį modelį aukštame abstrakcijos lygyje, mes sprendžiame sistemos architektūros problemą. Transformuodami aukšto lygio modelį į SystemC sintezuojamą aprašą, mes sprendžiame kintamųjų ir algoritmų transformavimo problemas. 4
6 2 Analitinė dalis 2.1 Vaizdų apdorojimo sistemos analitinė dalis Tyrimo objektas yra vaizdų apdorojančios sistemos SystemC modelio analizė. Pagrindinės problemos kyla sprendžiant pradinės specifikacijos transformavimą į SystemC modelius. Problemų sprendimui naudojame transakcijų lygio SystemC. Pradinis analizuojamas modelis yra parašytas naudojantis C++ programavimo kalba. Šis C++ modelis naudoja vaizdų apdorojimo specifinius algoritmus, kuriuos sugalvojome naudodamiesi literatūra apie realių objektų perkėlimą į trimatę erdvę. Vaizdų apdorojimo algoritmai naudojami įvairioms problemoms spręsti, kaip: Vaizdų pagerinimas medicinoje. Skaitmeninių nuotraukų apdorojimui. Kuriant protingas sistemas ( robotai, veido atpažinimas, objektų atpažinimo sistemos) Trimačių skenerių apžvalga Trumpai skirstant trimačius skenerius galimas jų rūšiavimas pagal trimačių sistemų apžvalgą ir pagal jų pritaikymą. Pasaulyje pirmosios bangos šio proceso prasidėjo apytiksliai prieš 20 metų, o panašiai prieš 10 metų sritis plačiai ištobulėjo ir buvo daugelyje gyvenimo atvejų pritaikytos. Nagrinėjant trimačius skenerius pagal sistemų apžvalgą reiktų paminėti, kad trimačių objektų kompiuteriniai modeliai vis plačiau taikomi įvairiausiose gyvenimo ir pramonės srityse. Tai: multiplikacija, archeologija, architektūra, dantų protezavimas, mokymas, rūbų ir aprangos kūrimas, avalynės gamyba, kriminologija, žaidimai, pramoninis dizainas, gamyba, medicina, kino pramonė, muziejai, esamų objektų planų ir projektų paruošimas, greitas prototipų gaminimas, atvirkštinis konstravimas, skulptūrų kūrimas, žaislų pramonė, formų gamyba, medienos pramonė, internetinių puslapių kūrimas ir kiti. įranga: Šiuo metu daugiau ar mažiau naudojami šie trimačių objektų skanavimo metodai ir Lazeriniai skeneriai (Laser Scanners); Skeneriai su rastriniais šviesos šaltiniais (Structured Light Scanners); 5
7 Lazeriniai radariniai skeneriai (Laser Radar Scanners); Lazerinio tolimačio skeneriai (Time of Flight Laser Scanners ); Holografiniai skeneriai (Holography); Profilio skeneriai (Profilers) Stereoskopiniai skeneriai (Dense Stereo Matching) Fotogrammetriniai skeneriai (Close-Range Photogrammetry) Nagrinėjant trimačius skenerius pagal jų pritaikymą galime apibrėžti galimas sistemos pritaikymo sritis: 1. Vizualinės kokybės kontrolės automatizavimas pramonėje. 2. Robotų valdymas pagal trimačius vaizdus. 3. Detalių rūšiavimo įrenginiai pramonėje. 4. Medienos pramonėje rąstų išpjovimo nustatymo sistemose. 5. Vaisių ir daržovių rūšiavimo įrenginiai. 6. Gėlių rūšiavimo automatai. 7. Automobilių kėbulų geometrijos matavimo įranga. 8. Trimačių vaizdų naudojimas ortopedijos pramonėje. 9. Trimačių vaizdų naudojimas avalynės gamybos pramonėje. 10. Vaikų dantų lanko parametrų matavimas pagal gipsines burnos ertmės kopijas. 11. Trąšų granulių ar kitų birių produktų dydžių ir svorių statistinė analizė gamybos procese. 12. Veidų identifikavimo ir klasifikavimo įranga ir sistemos. Šioje ataskaitoje bandysime apžvelgti, kas yra pasiekta kiekvienoje iš šių sričių ir kokios tolimesnės trimačių objektų identifikavimo sistemos, ar jos gamybos metu sukurtų programinės ar aparatūrinės įrangos pritaikymo galimybes. Taip pat apžvelgsime keletą veikiančių produktų ir juos šiek tiek panagrinėsime. 6
8 D skanerių sistemų apžvalga Lazeriniai skeneriai Lazeriniai skeneriai veikia trianguliacijos principu. Lazerio spindulys (atskiras taškas, linija ar keletas linijų) projektuojamas ant skanuojamo objekto. Video kamera, esanti šone nuo lazerio spindulio šaltinio mato lazerio spindulio vaizdą ant tiriamo objekto. Spindulio taškai ant objekto, esančio toliau, matomi kameroje paslinkti atžvilgiu taškų, esančių ant arčiau esančių objektų. Pagrindiniai lazerinio skanavimo privalumai yra tai, kad šis metodas pakankamai greitas, nekontaktinis ir tikslus. Labai trapūs objektai gali būti skanuojami nesijaudinant dėl jų pažeidimo. Lazeriniai skeneriai pakankamai greitai išmatuoja didelius taškų skaičius. Šiuo metodu gali būti matuojamos tik tos objekto dalys, kurias kerta lazerio spindulys, todėl norint gauti viso objekto modelį reikia skanuoti iš kelių pozicijų. Kartais lazeriniai skeneriai naudojami kartu su sukamaisiais stalais, kas leidžia tiksliai slinkti objektą vietoje perstatomo skenerio. Rankiniai lazeriniai skeneriai laisvai judinami erdvėje rankomis, tačiau šiuo atveju jų vietai nustatyti naudojama kitu principu veikianti padėties nustatymo sistema (pav. indukcinė). Didžiausios problemos kyla lazeriniams skeneriams susidūrus su labai spindžiais, šviečiančiais ar skaidriais paviršiais. Jie taip pat nekaip veikia ir skanuojant labai tamsius objektus. Šiuo atveju gali tekti tiriamą objektą nudažyti šviesiai arba padengti jį baltais milteliais, aprašoma [15]. Skeneriai su rastriniais šviesos šaltiniais Skeneriai su rastriniais šviesos šaltiniais projektuoja ant tiriamo objekto žinomos struktūros ir piešinio šviesos rastrą. Video kamera, esanti šone nuo šviesos šaltinio mato šviesos rastro vaizdą, kuris iškraipomas priklausomai nuo tiriamo objekto paviršiaus reljefo. Čia gali būti naudojami patys įvairiausi šviesos rastrai: taškiniai, linijiniai, tinkleliniai, apskritiminiai, sinusoidiniai ir kiti, tiek juodai balti tiek ir spalvoti. Toliau objekto taškų erdvinėms koordinatėms išskaičiuoti naudojama trianguliacija. Skeneriai su rastriniais šviesos šaltiniais iškart nuskanuoja visą vaizdo kameros matomą objekto paviršių. Norint gauti visą trimatį objekto modelį gali tekti pakartoti 7
9 skanavimą iš kelių erdvės taškų. Šiuo atveju kaip šviesos šaltinis naudojama halogeninė arba analogiška baltos šviesos lempa, todėl čia nekyla tų pavojingumo problemų, kurios žinomos naudojant lazerius. Lazeriniai radariniai skeneriai Lazerinio radarinio skenerio pagrindas - tai plačiajuostis dažniu moduliuojamas infraraudonųjų spektre dirbantis lazeris (100GHz moduliacija), kuris skleidžia stiprų, bet akims nepavojingą signalą. Duomenys greičio ir atstumo matavimui gaunami lyginant gaunamo signalo kylančio ir krentančio dažnio kitimo reikšmių sulyginimo metu. Signalo apdorojimo metu išskiriami interferenciniai dažniai yra tiesiogiai proporcingi atstumui iki objekto. Šio metodo privalumas didelis vieno taško atstumo nustatymo tikslumas, tačiau erdvinių koordinačių nustatymo tikslumas remiasi mechaninės skanavimo sistemos tikslumu. Taip pat nuo mechanikos galimybių priklauso ir skanavimo greitis. Lazerinio tolimačio skeneriai Lazeriniai tolimačio principu veikiantys skeneriai tiesiog siunčia į objektą šviesos impulsą ir matuoja laiką, po kurio šis impulsas grįžta. Žinodami, kad šviesos greitis yra pastovus ir žinomas, galime suskaičiuoti atstumą iki objekto matuojamo taško. Skenerio varikliai kraipo spindulį per visą skanavimo zoną. Trimatės objekto paviršiaus taškų koordinatės išskaičiuojamos kaip lazerio galvutės horizontalių ir vertikalių padėčių kampų ir išmatuotų atstumų visuma. Tokių skenerių tikslumas ir skiriamoji geba gana ribota, nes tai apsprendžia mechanika ir dažniausiai neviršija +/- 6 mm. Tačiau šių skenerių privalumas dideli matuojamo objekto gabaritai ir atstumai iki jų. Holografiniai skeneriai Naudoja lazerius ir holografinį principą, kad nustatyti atstumą ir paviršiaus reljefiškumą. Yra keli metodai. Dažniausiai naudojami paviršių kontrolei, bet gali būti ir trimačių objektų skeneriai. 8
10 Vienas iš tokių naudoja lazerius su valdomu bangos ilgiu ir fazės poslinkiu. Gali matuoti 12x12x16" darbinėje zonoje. Matavimas užima 2-3 minutes. Gerai veikia esant poliruotiems paviršiams. Tai aukštų technologijų įrenginiai ir pakankamai brangūs. Profilio skeneriai Profilio skeneriai naudoja technologiją panašią į naudojamą kine arba televizijoje, kai aktorius filmuojamas prie vienspalvio ekrano (dažniausiai žalio arba mėlyno) ir tuo būdu po to lengvai iškerpamas fonas ir įdedama reikiama scena. Profilio skeneriai dažniausiai turi kompiuterio valdomą sukamąjį stalą, pastatytą prieš vienspalvį ekraną. Skanuojamas objektas padedamas ant sukamojo stalo. Kiekvienoje posūkio padėtyje video kamera nuskaito objekto vaizdą. Skeneris išskaičiuoja objekto profilį, išskirdamas perėjimo vietą tarp fono spalvos ir bet kurios kitos. Turėdami profilio linijos koordinates ir žinodami stalo posūkio padėtis galime suskaičiuoti ir viso paviršiaus koordinates. Panaudojus kadrų nefonines spalvas, galima sukurti ir objekto spalvotas tekstūras. Šie skeneriai yra pakankamai paprasti ir pigūs, tačiau turi vieną esminį trūkumą. Jie visai negali atpažinti objekto įdubusių vietų. Stereoskopiniai skeneriai Stereoskopiniai skeneriai naudoja stereoskopinio matymo principą. Techninių sistemų atveju naudojami du vaizdai, kurie vienas kito atžvilgiu skirtingais kampais mato tiriamą objektą. Trimatei informacijai gauti naudojami specialūs vaizdų atpažinimo algoritmai, todėl šis metodas gana ribotai taikomas praktikoje, o daugiau yra mokslinių ir eksperimentinių tyrinėjimų stadijoje. Šiuo metu šis metodas kartais naudojamas veidų identifikavimo sistemose, nenaudojant pilno trimačio modelio sukūrimo. Panašiais principais veikia ir fotogrametrinis skeneris, tik čia naudojama daugiau vaizdų įvairiais rakursais. Fotogrametriniai skeneriai 9
11 Fotogrametrinė technika leidžia jums iš dvimačių objekto nuotraukų gauti trimatį objekto modelį. Naudojant žinomų charakteristikų (objektyvo fokuso atstumas, matricos didis ir pikselių skaičius) skaitmeninę kamerą, jums reikės mažiausiai dviejų objekto nuotraukų. Jei jūs galėsite identifikuoti tuos pačius tris taškus ant vaizdų ir žinosite, kurios nors objekto dalies tikslius išmatavimus bus galima suskaičiuoti ir kitų objekto dalių erdvines koordinates. Šis metodas labai tinka, kai yra ribotas laikas modeliuojamo objekto tyrinėjimams. Vaizdus galima gauti labai greitai. Mokestis už tai ilgas vaizdų apdorojimas ir neišvengiamas rankinis darbas. Jei kuriamo modelio tikslumui gauti reikia pakankamai daug erdvinių taškų darbas bus ilgas ir varginantis. Šio metodo tikslumą ir gauto modelio kokybę apsprendžia visa eilė veiksnių: tai ir kameros objektyvo kokybė ir video matricos skiriamoji geba, kameros kalibravimo tikslumas ir naudojamų vaizdų skaičius. Nenagrinėtos tokios įrangos rūšys: kaip akustiniai (Acoustic Position Trackers), lazeriniai (Laser Trackers), magnetiniai (Magnetic Position Trackers) ar optiniai (Optical Position Trackers) padėties lokatoriai ir mechaniniai trimačių objektų skeneriai kaip koordinatinės matavimo mašinos (Coordinate Measurement Machines) ir kontaktiniai zondai (Touch Probes). Padėties lokatoriai skirti ne trimačio objekto skanavimui ir jo modelio sudarymui, o objekto judėjimo trimatėje erdvėje sekimui. Mechaniniai trimačių objektų skeneriai pagal savo veikimą ir charakteristikas visai netinka mūsų projekte keliamiems tikslams realizuoti D skanerių pritaikymo sritys Vizualinės kokybės kontrolės automatizavimas pramonėje Pramonėje gaminami produktai dažniausiai yra trimačiai. Taikant dvimates kompiuterinės regos sistemas kokybės kontrolei, reikia tiksliai pozicijai nustatyti kontroliuojamus objektus, nes tik tokiu būdu galima įvertinti atitinkamus geometrinius parametrus. Trimačių vaizdų identifikavimo sistema įgalina tiksliai nustatyti objektų geometrinius parametrus, kai tiriamų objektų koordinatės nėra griežtai ir tiksliai žinomos. 10
12 Šio projekto vykdymo metu, buvo atlikti keli bandymai panaudoti sistemą elektrinių jungčių kokybės kontrolei jų gamybos ir montavimo metu. Bandymai parodė tokios kontrolės galimybę, tačiau tikslesniems rezultatams gauti reikia pagaminti šiek tiek kitokią, mažiems objektams skenuoti skirtą aparatūrą Robotų valdymas pagal trimačius vaizdus Pramoniniai robotai valdomi pagal griežtai nustatomas koordinates. Trimačių vaizdų identifikavimo sistema galėtų suteiktų galimybę robotui orientuotis kintančioje realioje erdvėje. Tai suteiktų galimybes daug plačiau taikyti robotus pramonėje. Šiame etape buvo atlikta analizė ir patyrinėta galimybė pritaikyti kuriamą trimačių objektų identifikavimo sistemą, robotų ar intelektualių vežimėlių orientacijai erdvėje. Kaip parodė analizė, šioje srityje šiuo metu perspektyvesnė yra ultragarsinė arba lazerinė lokacija. Detalių rūšiavimo įrenginiai pramonėje Detalių rūšiavimo įrenginiai daugiausia naudoja dvimates kompiuterinės regos sistemas. Trimačių vaizdų identifikavimo sistema suteikia galimybę paspartinti rūšiavimo procesą ir palengvinti rūšiavimo įrenginio mechaninę dalį, nes nereikia tiksliai žinoti detalių pozicijos. Šioje srityje kaip tik ir buvo pirmas konkretus trimatės identifikavimo sistemos taikymas. Panaudojant įrangą, algoritmus ir programas sukurtas projekto vykdymo metu, buvo atlikti eksperimentai su saldainių identifikavimu, kas leistų imtis projektuoti ir gaminti saldainių pakavimo liniją su joje instaliuota saldainių gabaritų ir defektų identifikavimo įranga. Ši įranga veikia panaudojant kombinuotą trimatės ir dvimatės kompiuterinės regos sistemą. Šis įrenginys brokuoja netinkamų gabaritų ir pažeistus saldainius slenkančius konvejeriu. Tarkim saldainių srautas 1800 saldainių per minutę. Tokiu būdu jie visi skaidomi į 10 eilių ir kiekvienas 5 eiles analizuoja atskiros sistemos su dviem lazeriniais skeneriais ir dar dviem kampu žiūrinčiom vaizdo kamerom, kurios identifikuoja saldainių šoninių sienelių defektus. Specialiai šiai sistemai adaptuota programinė įranga išanalizuotu vaizdus, atstatytu modelį ir skersinius pjūvius, bei priimtų sprendimą, apie saldainio tinkamumą per maždaug 20ms laiko intervalą. Pagal šios sistemos komandas netinkami saldainiai nupučiami į broko konvejerį. 11
13 Tokios sistemos ar jų grupės gali būti taikomos tiek pramonėje, kuri gamina produktus panašius į saldainius, tiek ir kitokius objektus. Šios sistemos specifika yra didelis greitis, todėl naudojamas supaprastintas trimatis identifikavimas. Lėčiau konvejeriu judantiems objektams ši sistema dar perspektyvesnė, nes galime žymiai tiksliau skenuoti tiriamus objektus ir identifikuoti sudėtingesnius defektus. Vaisių ir daržovių rūšiavimo įrenginiai Šie įrenginiai tai tam tikras atskiras detalių rūšiavimo įrangos variantas. Šie objektai turi tam tikrą specifiką: dažniausiai juos būtina skenuoti iš visų pusių ir būtina teisingo jų identifikavimo sąlyga yra spalvinės informacijos turėjimas. Tai susiję su jų defektų buvimu bet kurioje vietoje ir dažnu atveju, kai ne tik geometrijos ar reljefo pokyčiai, bet ir spalviniai pokyčiai apsprendžia tiriamo objekto kokybę. Trimačių vaizdų naudojimas ortopedijos pramonėje Žmogaus pažeistų galūnių trimatis skenavimas reikalingas gaminant ortopedinius gaminius. Preliminariai buvo aptartas tokios sistemos poreikis su specialistais dirbančiais protezų gamybos srityje. Tikslus galūnės, prie kurios tvirtinamas protezas kompiuterinis modelis ypač reikalingas, kai protezas gaminamas toli nuo jo vartotojo gyvenamos vietos ir naudojant modernias kompiuterių valdomas protezo gamybos technologijas. Vis labiau plintant ir pingant šioms technologijoms, skenavimo poreikis įrengimams taip pat augs. Trimačių vaizdų naudojimas avalynės gamybos pramonėje Avalynės, o ypač ortopedinės, gamintojai buvo vieni iš pirmųjų, kurie domėjosi trimačių kojos modelių atkūrimo galimybe. Domintis pramones poreikiais, paaiškėjo, kad juos labiausiai domina trimačių kojos modelių panaudojimas automatizuotai avalynės gamybos projektavimui ir paruošimui. Tai labai specifinė šaka reikalaujanti didelės patirties šioje srityje ir net specialistams sunkiai suprantama. Toliau domintis šia sritimi, paaiškėjo, kad be ortopedinės avalynės, pasaulyje plinta prekybos avalyne variantas, kai batas parenkamas tiksliai klientui pagal kompiuterinį jo kojos modelį. Šiam metodui išplatinti reikia daug ir pigių kojų skenavimo įrenginių. Todėl veikla tokio įrenginio kūrimo kryptimi yra visai galima ir puikiai leistų panaudoti žinias. 12
14 Vaikų dantų lanko parametrų matavimas Šie matavimai atliekami naudojant burnos ertmės gipsines kopijas ir skirti įvertinti vaikų dantų ir žandikaulio vystymąsi bei diagnozuoti vystymosi anomalijas. Trąšų granulių ar kitų birių produktų dydžių ir svorių statistinė analizė gamybos procese Granuliuotų trąšų ar kitų birių produktų gamybos procese labai svarbu pastoviai kontroliuoti dalelių dydžių procentinę sudėtį sraute. Nukrypimai nuo reikiamo dydžio dažniausiai reiškia technologinius nukrypimus ir reikalauja įsikišimo. Šiuo metu šie parametrai dažniausiai kontroliuojami rankiniu būdu sijojant medžiagas per skirtingo tankumo sietus ir po to sveriant. Tačiau norint suskaičiuoti medžiagos svorio pasiskirstymą, jau reikia pamatuoti erdvinį dalelių dydį. Veidų identifikavimo ir klasifikavimo įranga ir sistemos Paskutiniu metu apsaugos sistemose ir identifikavimo ir riboto darbuotojų įleidimo sistemose pradėtas plačiai taikyti žmonių identifikavimas pagal trimačius veido modelius. Šios sistemos yra kelių sudėtingumo lygių, pradedant nuo dvimačių kompiuterinės regos sistemų iki su sudėtingais kūno skeneriais sujungtų sistemų. Atlikta analizė parodė, kad nesudėtingas, bet patikimas veido skeneris žmonių identifikavimui turėtų paklausą. Šiai kompiuterinės regos sistemų grupei smarkiai šiuo metu vystantis labai tikėtina, kad atsiras ir daugiau trimačių objektų identifikavimo sistemų pritaikymo sričių, kur sėkmingai bus panaudotos įgytos žinios. 13


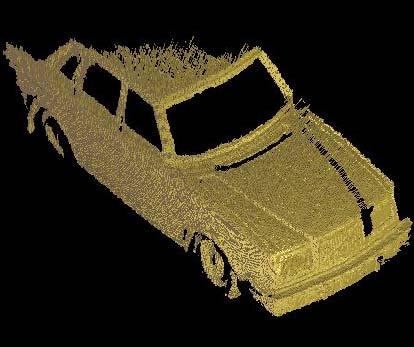
15 2.1.5 Pramoninių 3D sistemų analizė Vienas iš didžiausių 3D skanerių gamintojų Amerikoje yra Laser Design Inc, kuri yra viena iš pirmaujančių bendrovių pasaulyje. Laser Design Inc gamina lazerinius 3D skanerius jau nuo 1987 m. Gaminami bendros paskirties 3D skaneriai yra montuojami ant aukšto tikslumo CMM (Koordinačių matavimo mašina), kurie suteikia sistemai didelį tikslumą. Įmonė taip pat gamina specifiniams tikslams pritaikytus skanerius, kaip batų arba protezų skanavimas, odontologijos, klausimosi apartų, juvelyrinių dirbinių, geležinkelių bėgių, mobiliųjų telefonų, ir t.t. aprašoma [14]. Įmonė ne tik gamina įrenginius, bet ir teikia 3D skanavimo paslaugas. Šiuo metu įmonėje gaminami ir pardavinėjami šie bendros paskirties skaneriai. Pav. nr. 1 Greitas ir tikslaus 3D skaneris, naudojantis CMM. Skaneris yra patogus naudojimui siūlo vartotojams išskirtines galimybes skenuojant sudėtingos formos objektus. Naudodami įmonės patentuotas technologijas įrenginys skanuoja objektą iš visų orientacijų, atlikus darbus įrenginys konvertuoja koordinates į vieningą koordinačių sistemą. Operatoriai gali greitai, bei patogiai konvertuoti įvairaus dydžio bei sudėtingumo objektus, ypač tokius su sudėtinga geometrija. Pav. nr. :2 14


16 Tai 3d skaneris su integruota septynių ašių ranka Ultra prieinama, lengvai naudojama su integruota ranka yra panaudotina visų tipų detalių skanavimui. Be to įrenginiai yra pateikiami su programine įranga, kurios pagalba nuskanuoto objekto duomenis galima perkelti į kitą programinę įrangą. Pateikiama ir specifiniams poreikiams naudojama aparatūrinė bei programinė įranga pvz. batų skanavimo sistema. Pav. nr. 3 Pav. nr. 4 Išskirtinai sukurta batus kuriančiam institutui, atlikti automatinio skanavimo funkcija. Ši produkto linija yra kompaktiškai pastatoma ant stalo. Sistema yra sukurta tiksliam automatinam skanavimui vidutinio dydžio produktams, tokiems kaip batai - puspadžiai. Sistema yra paremta besisukančiu padu, bei 200 mm pločio lazeriu. Sistema yra skirta didelio tikslumo objektų skanavimui. Su įrenginiu pateikiama ir programinė įranga Surveyor Scan Control (SSC) apdoroja gautus duomenis iš skirtingų orientacijų perkelia į trimatį taškų debesėlį esantį įprastoje koordinačių sistemoje. Visas procesas užtrunka tik keletą minučių ir yra labai tikslus. Galima netgi apversti objektą ir skanuoti jį antrą kartą ir gautus du duomenų masyvus automatiškai sujungti į vieną objektą. Taip pat galime rasti pačių paprasčiausių įrenginių naudojančių pigius įrenginius ir nemokamas programas. Tokių prietaisų veikimo principai gali būti labai panašūs, tik jų tikslumas gali būti labai mažas. Tokie įrenginiai panaudojami smulkių objektų perkėlimui į kompiuterį moksliniais tikslais. 15

17 Pav. nr. 5 Pav. nr. 6 16
18 2.2 C ++ kalbos analizė C efektinga programavimo kalba. Ji leidžia geriausiai išnaudoti kompiuterinius resursus. C kalba parašytos programos yra kompaktiškos ir greitai vykdomos. C mobilioji programavimo kalba. Tai reiškia, jei programa parašyta šia kalba, ji gali būti lengvai, su nedideliais pataisymais arba visai be jų, perkeliama į kitas skaičiavimo sistemas, pvz.: iš IBM kompiuterio perkelti programos veikimą į UNIX. C galinga ir lanksti programavimo kalba. Didelė dalis galingos UNIX ir Windows operacinės sistemos parašyta C kalba. C kalba parašytos programos naudojamos fizikiniams ir techniniams uždaviniams spręsti, taip pat naudojamos ir animacijai kurti. C turi galimybę panaudoti eilę valdančiųjų konstrukcijų, kurios paprastai asocijuojasi su asembleriu. Programavimo procesas Programos rašymas yra gana ilgas procesas, kuris schematiškai yra pavaizduotas 7 pav. Pirma, pasinaudojus turimu redaktoriumi, rašomas programos tekstas. Čia svarbu neapsirikti renkant programos tekstą ir parinkti bylos vardą, kurioje bus programa. Programos teksto byla *.cpp arba *.c (pirmasis C++ kalba, antrasis C). Toliau parašytą programą kompiliuojame, t.y. mūsų parašytą programą perrašome kompiuterio kalba ir gauname objektinę (*.obj) bylą. Tai gali būti tik gabaliukas programos. Galiausiai, visus programų gabaliukus sujungia į vieną *.exe bylą kita programa, vadinama komponuotuoju (linker). Ši programos dalis kartu įtraukia ir bibliotekines funkcijas. Tačiau gautoji programa yra su klaidomis, todėl ją reikia derinti ir taisyti. Tai atliekama derintojo (Debugger) programos pagalba. Programuojant C++ programavimo kalba pradinę specifikaciją yra geras pasirinkimas, nes SystemC yra C++ sistemų modeliavimo biblioteka. Modeliuojant sistemą aukštame abstrakcijos lygyje nesunkiai galime transformuoti pradinį C++ programos kodą į SystemC transakcijų lygio modelį 17
19 Pav. nr. 7 Borland kompiliatorius 2.3 SystemC analizė SystemC tai aukšto abstrakcijos lygio kalba skirta aparatūros aprašymui ir galinti imituoti aparatūros veikimą tam tikrais laiko intervalais. SystemC skirstoma i 2 atskiras sritis: TLM kalba (skirta modeliavimui) RTL kalba (skirta sintezavimui) SystemC (TLM) transakcijų lygio modeliavimas Transakcijų lygmens modeliavimas (TLM) yra aukšto lygio metodas skaitmeninių sistemų modeliavimui, kur tarp-modulinės komunikacijos detalės yra atskirtos nuo funkcinių dalių išpildymo ar komunikacijos architektūros. Komunikacijos mechanizmai, pvz., magistralės (duomenų mainai) ar FIFO, yra modeliuojami kaip kanalai ir yra sujungiami į modulius kaip SystemC sąsajos klasės. Transakcijų užklausos vyksta, kviesdamos sąsajos funkcijas tų kanalo modelių, kurie enkapsuliuoja žemo lygio informacijos keitimo detales.. TLM lygmenyje, pabrėžiamas duomenų perkėlimo funkcionalumas - kokie duomenys yra iš kur persiųsti ir į kur - mažai kreipiant dėmesį į jų žemiausio lygio išpildymą ar naudojamą tam protokolą. Šis metodas sisteminio lygmens projektuotojui leidžia išbandyti skirtingas sistemos modifikacijas, pavyzdžiui, skirtingą magistralių architektūrą, kai nebereikia iš naujo koduoti modelių, kurie bendrauja su magistralėmis, nes komunikuojama per bendrą sąsają. 18
20 TLM labiausiai tinka tarprocesiniui ir komunikavimo modeliavimui, bet ne algoritmų kūrimui, kurių pagrindu patys procesai veikią. Sistemos elgsenos modelyje atsiranda subendrinti procesai, kurių vieni kuria duomenis, kiti juos naudoja, dar kiti inicijuoja įvairius ryšius arba pasyviai atsakinėja į kitų procesų užklausas. C++ SystemC TLM RTL Pav. Nr. 8 C++/SystemC/TLM/RTL (abstrakcija) Transakcijų lygio SystemC (TLM) ir SystemC yra paremta C++ programavimo kalba. (pav. nr. 8) Modeliuojant sistemą yra svarbu sutrumpinti sistemos kūrimo laiką, panaudoti jau rinkoje esančius komponentus (pakartotinis panaudojimas jau esamu sukurtų komponentu ir, arba pridedant išorinius procesorius.) Kadangi TLM aprašymas yra aukštesnio abstrakcijos lygio, tai padeda išvengti daugybės klaidų, kurios būdingos RTL lygmeniu. RTL lygyje analizuojama kiekvienas atminties bitas, aprašoma [2] 19
21 Kodas Simuliacija Relizacija C++ Algoritmas Funcinis 10000x (1 min.) 20x (2 dienos) TLM specifikacija Stukturinis 1000x Laikinė TLM specifikacija Tranzakcijų 100x SystemC Periodinis 10x 2x (2 savaitės) RTL RTL 1x (7 dienos) 1x (5 savaitės) Mindaugas Vytautas Pav. Nr. 9 modeliavimo etapai, simuliacijos ir realizacijos sudėtingumo didėjimas, aprašoma [9]. Diagramoje yra pateikiama sistemos funkcinio modelio transformavimo žingsniai ( kokios priemonės yra naudojamos skirtinguose žingsniuose). Yra pateikiama kaip didėja: Abstrakcijos lygis. Sudėtingumo lygis. Realizacijos laikas. Modeliavimo laikas TLM kalba TLM pirma versija jau yra OSCI standartas. Projekte naudojama TLM antroji versija šiuo metu nėra paskelbta kaip OSCI standartas, tikimasi, kad po viešo aptarimo antroji versija taip pat taps OSCI standartu. Viešas aptarimas vyks birželio mėnesį. Problemos iškylančios dėl sistemos neišbaigtumo: Tad dokumentacija nėra labai geros kokybės. Nėra daug straipsnių ir informacijos. Mažokai pavyzdžių. 20
22 Pav. nr. 10 TLM pavyzdys, aprašoma [4] TLM suderinamumas TLM standartas orientuojasi į SoC sistemų suderinamumą (daugelio gamintojų patiekiamų sistemų suderinamumą), kurios yra pagristos atminties elementais pririštais prie magistralių. Taip pat yra pateikiamas bazinių sistemų pririšimas prie geležies, be kurio negalimas sistemų suderinamas. TLM sistemos kūrėjai yra susifokusavę į šiuos sistemų modelius. Modeliavimas netikslaus laiko sistemų pagrįstas atminties pririštos prie magistralių modeliavimu (Modeling of loosely-timed systems based on memory-mapped busies) Modeliavimas apytikrio laiko sistemų pagrįstas atminties pririštos prie magistralių modeliavimu (Modeling of approximately-timed systems based on memory-mapped busies) aprašoma [5] Kadangi yra labai daug atminties tipų pririštų prie magistralių, tai TLM modelyje yra problematiška juos visus įvertinti (reikalinga naudoti parametrus ar atributus). Bendrinė TLM specifikacija (modelis) turi būti sudaryta iš vartotojo apibrėžtų šablonu. Žemo lygio kintamieji yra rekomenduotini vartotojams naudojantiems šablonus. 21
23 2.3.4 Transakcijų lygio modeliavimo sritys ir pritaikymo galimybės Modelių naudojimas, SW/HW integracija Naudojantis modeliais galime: Programinės įrangos kūrimas naudojantis TLM modeliais ( operacinės sistemos tvarkyklių kūrimas, aplikacijų rašymas naudojantis valdyti ar gauti duomenis iš aparatūros). Prie aparatūrinių modelių (parašytu TLM) galime prijungti derinimo sistemas. Naudodami loosely timed modelius, galime kurti tikras programas (programos kurios išnaudos aparatūrą) Programose galime įvertinti bitų eiliškumą. (realios programinės įrangos kūrimas ir testavimas) Modelių našumo įvertinimas. Modelių patikros frazėse galime įvertinti integruotos programinės įrangos teisingumą, išmatuoti tikėtiną integruotos programinės įrangos greitį. Kurti skirtingus integruotos programinės įrangos profilius, optimizaciją. Greitas modelių modifikavimas. Aparatūros architektūros analizė. Anksti galime specifikuoti aparatūrą, nustatyti reikalingus resursų modelius. (TLM fokusuojasi daugiau į atminties posistemes ir aukšto dažnio spartintuvus) Pakankamai tikslus aparatūros našumo nustatymas. Sistemos didelis lankstumas, didelės konfigūravimo galimybės, aukštas modelių efektyvumas. Galime naudoti tikrą programinę įrangą patikrinti modelio funkcionalumą, aprašoma [6] 22
24 Pav. nr. 11 RTL sistemos pavyzdys Modeliuojant sistemas RTL lygyje naudojami signalai, ventiliai procesai ir registrai. Kad patikrintume visus sumodeliuotus modelius reikia daugiau laiko, nes reikia patikrinti kiekvieną signalą, jo sujungimą. Naudojami algoritmai yra sudėtingesni ir,žinoma, sistemos modeliavimas yra žymiai sudėtingesnis nei transakcijų lygyje. Naudodamiesi SystemC transakcijų lygio modeliavimu, mes mėginsime sumodeliuoti savo pasirinktą modelį. Toliau pateikiama panašių modelių analizė naudojantis TLM. Pateiktajame straipsnyje analizuojama SystemC TLM pritaikymo galimybė. Analizuota sistema yra realaus laiko įterptinė sistema, kuri yra labai panaši i mūsų analizuojamą sistemą. Patiekiami algoritmai ir rezultatai. Naudojantis TLM pavyko įgyvendinti savo tikslus t.y. sumažinti sistemos kūrimo laiką, gauti sistemos techninius duomenis, greitai pritaikyti kelis algoritmus (greitai modifikuoti sistemą). Šiame straipsnyje analizuojama daugiaprocesorinė vienlustė sistema, kuri aprašoma ir modeliuojama naudojantis SystemC bei transakcijų lygio modeliavimo biblioteka. Straipsnyje analizuojama didelės sistemos modeliavimo problemos sistemos modelio parinkimo TLM modeliavimo koncepcija. Pateikiama analizė skirta specifinių algoritmų vaizdų apdorojimo sistemoms kurti. 23
25 2.3.5 RTL sintezės taisyklės Sintezė - objekto aprašo transformavimas į bit vektorius. Bit vektoriai yra apibrėžiami skilčių skaičiumi (duomenų pločiu). Skilčių skaičius nusako maksimalią bit vektoriaus kintamojo reikšmę. Kaip pavyzdį galime panagrinėti Boolean tipo kintamąjį, turintį tik vieną bitą. Jis gali būti analogiški aprašomas kaip sc_uint<1> arba sc_big_int<1>; Skilčių skaičius paprastai turi būti nurodomas pradžioje, bet naudojant klasių tipą, tai gali būti nutylėta ir sintezės metu automatiškai apskaičiuota. Taip pat reikia skirti realius objektus ir menamus. Paprastai su duomenų įėjimo vektoriumi nevykdomi jokie veiksmai tik priskirimas pabaigoje. Visi skaičiavimai būna vykdomi papildomuose bit vektoriaus kintamuosiuose (dažniausiai vadinami temp). Aparatūros realizacija su skaičiavimais remiasi postūmiais. RTL naudoja postūmių procesus operacijų vykdymams. Tai galima aprašyt naudojantis SC_METHOD procesą su jautrumo sąrašu paimant tik teigiamus sinchronizacijos signalo įėjimo frontus. Taip pat įmanoma naudoti SC_CTHREAD procesą ir elgsena nuo to nepasikeis. Kaip bebūtų SC_CTHREAD procesas yra mažiau efektyvus ir modeliavimas dėl to vyks lėčiau. Sinchronizacijos signalas turėdamas teigiamą frontą tikrina, ar signalas pasikeitė, ir tikrina, ar jo reikšmė lygi vienetui. Tada pagal jį paprastai priskiriamos duomenų įėjimo reikšmės. Pabaigoje proceso postūmio darbalaukis yra priskiriamas išėjimo signalams. Sudėtingesni įtaisai yra aprašomi būsenų automatais. Būsenų automatas startuoja visada nuo pirminės būsenos. Vėliau pagal įėjimų reikšmes būsenos keičiasi. Būsenų automato realizacija apsprendžiama vienu-dviem SC_METHOD procesais. SC_METHOD procesai yra patys efektingiausi ir juos rekomenduojama naudoti visur. Sintezuojant reikia atkreipti dėmesį į sintezės taisykles Sintezės taisyklės Moduliai gali palaikyti Pavienius arba lygiagrečius procesus aprašant kombinuotą arba nuosekliąją logiką. Lygiagrečius modulius aprašant hierarchijas Funkcijų kintamuosius 24
26 Procesai Tik SC_METHOD yra palaikomas RTL sintezės (naudojant Synopsio SystemC kompiliatorių) SC_CTHREAD tik palaikomas elgsenos sintezėje (pagal Synopsio SystemC kompiliatorių). Procesas SC_METHOD Jautrumo sąrašas Visi signalai, kurių procesas yra jautrus, turi būti surašyti jautrumo sąraše. Pilnas aprašymas Visos kombinacijos įėjimų reikšmių turi būti padengtos Kintamieji Gali būti prieinami SC_METHOD procesams. Duomenų tipai Sintezę palaiko ne visus duomenų tipus (žiūrėti Lentelė. 1) Duomenų tipai Skilčių skaičius Palaikymas sintezei Sc_bit: giminingas c++ bool 2 Rekomenduojamas Sc_bv 2 Rekomenduojamas Sc_logic and sc_lv<n> 4 Tik kai reikia Sc_bv<n>:sc_uint<n> 1-64 Rekomenduojamas Sc_uint<n>:max 64 bitai su ženklu 1-64 Rekomenduojamas Sc_int<n>:max 64 bitai be ženklo 1-64 Rekomenduojamas Sc_bigint<n> and sc_biguint<n> >64 Tik kai reikia Lentelė. 1 Duomenų tipai Pagrindiniai SystemC projektavimo blokai Registrai (DFF) yra vienas iš pagrindinių RTL projektavimo blokų. Praktikoje dažniau naudojami (D flip flops) registras su asinchroniniu reset signalu yra vienas iš bazinių RTL projektavimo blokų. Panaudojant vieną kartą reset signalą projekto eigoje projektuotojai gali nustatyti registrą (flip flops) į pradinę žinomą būseną. Poslinkiai 25
27 //DFFa.h #include systemc.h SC_MODULE(dffa) { Sc_in<bool> clock; Sc_in<bool> reset; Sc_in<bool> din; Sc_out<bool> dout; Void do_ffa() { If (reset) Dout = false; Else if (clock.ecent()) dout=din; } SC_CTOR(dffa) { SC_METHOD(do_ffa); Sensitive (reset); Sensitive_pos (clock); } }; Postūmių registras (shifter) -tai daug sudėtingesnis įrenginys galintis ne tik nustatyti į pradinę, bet ir į bet kurią būseną. Paprastai turi duomenų įėjimo (data), reset, ir duomenų užkrovimo (load) galimybes. Apačioje pateikiame postūmio registro pavyzdį #include systemc.h SC_MODULE(shift) { sc_in<sc_bv<8> > din; sc_in<bool> clk; sc_in<bool> load; sc_in<bool> LR; sc_out<sc_bv<8> > dout; sc_bv<8> shiftval; void shifty(); SC_CTOR(shift); { SC_METHOD(shifty); sensitive_pos (clk); } }; 26
28 //shift.cc #include shift.h void shift::shifty() { if (load) shiftval = din; else if (LR) { shiftval.range(0,6) = shiftval.range(1,7); shiftval[7] = 0 ; } else if (!LR) { shiftval.range(1,7) = shiftval.range(0,6); shiftval[0] = 0 ; } dout = shiftval; } Būsenų automatas Būsenų automatas naudojamas aprašyti sudėtingiems įtaisams. Būsenų automatas visada startuoja į pradinę būseną. Vėliau naudodamasis įėjimo reikšme būsenos keičiasi. Kaip pavyzdys būsenos gali būti kartojimo, įrašymo, ištrynimo ir t.t. Apačioje pateiktas pavyzdys // busenų automatas SC_MODULE(automatas) { sc_in<bool>clk; sc_in_<char> key;... sc_out<sc_logic> operation; sc_out<sc_logic>address; void getnextst(); void setst(); SC_CTOR (automatas) { SC_METHOD(getnextst); sensitive << key << curent_state; SC_METHOD(setst) sensitive_pos (clk); } }; 27
29 Atminties elementas Atminties modelis yra skirtas talpinti ir dirbti su didesniais duomenų kiekiais masyvais ir matricomis. Atmintis blokas susideda iš būsenos aktyvavimo signalo (RnW- rašyti ar skaityti), turi vieną įėjimą-išėjimą duomenims (data) ir kintamąjį (address), kuris nurodo iš kurios atminties vietos imame, ar į kurią rašome informaciją. Apačioje pateikiamas atminties elemento pavyzdys: //ram.h #include systemc.h SC_MODULE(ram) { sc_in<sc_int<8> > address; sc_in<bool> RnW; sc_inout_rv<16> data; void read_data(); void write_data(); sc_lv<16> ram_data[256]; SC_CTOR(ram) { SC_METHOD(read_data); sensitive << address << RnW; SC_METHOD(write_data); sensitive << addres<< RnW << data; } }; // ram.cc #include ram.h void ram::read_data() { If(!RnW) data = ram_data[address.read()]; Else data = zzzzzzzzzzzz ; } void ram::write_data() { If(RnW) ram_data[address.read()] = data; } 28
30 SystemC kalbos architektūra Paveikslėlis pav. nr. 12 apibendrina SystemC 2,0 kalbos architektūrą. Čia yra keletas svarbių apibrėžimų šioje diagramoje. SystemC yra sukurta C++ pagrindu Viršutiniai diagramų sluoksniai yra pastatyti remiantis žemesniais sluoksniais SystemC kalba apibendrina tik minimalias modeliavimo konstrukcijas struktūriniu aprašymu, vienalaikiškumu, komunikavimu ir sinteze. Duomenų tipai sintezes atveju yra skirtingi nuo kalboje palaikomu duomenų tipų, bet vartotojo susikurti duomenų tipai yra pilnai palaikomi. Bendrai naudojama bendravimo mechanizmai, tokie kaip signalai, fifos ir (MOCs) gali būti sukurti aukščiausiame modulio lygyje. Yra galimybė žemesnius diagramų sluoksnius naudoti ir be aukštesnių sluoksnių. Pav. Nr. 12 SystemC 2,0 kalbos architektūra. 29
31 Mūsų nagrinėjama sistema atrodo taip, kaip pavaizduota paveikslėlyje pav. 13 SC_MODULE(MODULE) { sc_in_clk clock; sc_in_clk reset; sc_in <sc_uint<9> > data; //ram kintamiji sc_out<bool> RnW_s; sc_out<sc_uint<10> > address_s; sc_out<sc_uint<9> > data_new; sc_uint<3> STATE; //papildomu kintamuju eile sc_uint<n> temp; void mudule(); void print(); SC_CTOR(MODULE) { SC_METHOD(module); sensitive << clock.pos() << reset.pos(); SC_METHOD(print); sensitive << clock.pos(); } }; Pav. nr. 13 Turime 3 įėjimo signalus clock, reset, ir data ir tris išėjimo signalus RnW, address, data_new tai yra mūsų objektai. Taip pat turime tam tikrą skaičių papildomų temp signalų, kurie yra naudojami tik modulio viduje. 30

32 2.4 Projektavimo įrankiai Pav. nr. 14 -vienlustės sistemos projektavimo diagrama (UML-SoC design flow) Projektavimo procesą pradedam nuo specifikacijos, sudarytos pagal sistemos reikalavimus. Tai dažniausiai būna funkcinis sistemos modelis aprašytas natūralia kalba. Sistemos funkcinis vykdomasis modelis(arba algoritmo specifikacija) yra modelis pagal reikalavimus fiksuojantis sistemos elgseną. Tai dažniausiai yra daroma naudojant programinės įrangos programavimo kalbas (C/C++) arba modeliavimo įrankius tokius, kaip Simulink. Toks funkcinis lygis apibrėžia pilną sistemos modelį įskaitant tiek aparatūros, tiek programinės įrangos dalis, kurie yra verifikuojami su aukštu abstrakcijos lygiu. Esminis pasirinkimas - sudalinimas sistemos į aparatūros ir programinės įrangos dalis, kas apsprendžia galutinį skirtingų dalių likimą ir esamos sistemos galimybes. Aparatūros dalis pradžioje apibrėžiama aparatūros aprašymo kalba RTL lygyje. RTL aprašas automatiškai gali būti transliuojamas į pasirinktą technologinę platformą. Transliavimo metu yra naudojama loginė sintezė. Loginės sintezės rezultatas yra struktūrinis aprašas (netlist.) Po to atliekamas fizinis projektavimas. Fizinio projektavimo metu struktūrinis aprašas (netlist) papildomas informacija apie automatinį išdėstymą ir sujungimų transliavimą. 31

33 UML integracija į projektą leidžia pereiti į kitą projekto abstrakcijos lygį. UML panaudojimas projektuose: vizualizavimas, pernaudojimas, integracija, dokumentacija, modelio analizė ir automatinis generavimas SystemC kodo. Tranzakcijos lygis pasižymi tuo, kad palaiko tiek programines, tiek aparatūros dalis. Programinė dalis gali buti sumodeliuota ir duoti laiko diagramas, pagal kurias matome elgsenos modelį. Tam panaudojame testbench modelį. Tuo tarpu aparatūros modelis mums leidžia dar ir verifikuoti projektą ir sumodeliuoti lustą. Pav. nr. 15 ryšiai tarp modeliavimo kalbų (Relations of design languages) 15 paveikslėlyje parodytas ryšys tarp programinės įrangos ir aparatūros Kaip matome SystemC apjungia tiek programinę, tiek aparatūros dalį. 32
34 2.5 Projektavimo metodika SystemC kalbos analizė SystemC - tai aukšto abstrakcijos lygio kalba, galinti imituoti aparatūros veikimą tam tikrais laiko intervalais. Kanalai yra viena yra iš priemonių aprašyti sistemos veikimą. Kanalai leidžia patogiai tvarkyti komunikacijų sistemas. Jie gali modeliuoti paprastas komunikacijas, arba pristatyti kompleksines schemas, kaip specialias magistrales. Kanalai yra specifikuojami pagal sąsają, kuri palaiko juos. Procesai bendrauja tarpusavyje per kanalus. Prisijungimas prie kanalų per sąsajas. Sąsajos gali būti skirtingos. Moduliai yra sujungti su kanalais jungtimis. Jungtys yra objektai modeliuojantys procesų prieigą prie kanalų. Jungtys gali būti sujungtos arba virtualiais kanalais (channel), arba sąsajom (interface). Pav. nr. 16 Hierarchinė struktūra sistemos projektavimo SystemC aplinkoje procesų pagalba aprašomas funkcionavimo mechanizmas. Procesai yra vykdomi lygiagrečiai, tokiu būdu imituojamas realios aparatūros funkcionavimas. 33
35 Modeliuojant pasikeitimus SystemC naudoja procesų koncepciją paaiškinta pav. nr.16. Kaip ir kitos aparatūros aprašymo kalbos (Verilog, VHDL, ) SystemC modeliavimas vyksta branduolyje, kuris keičiasi esant skirtingiems konkuruojantiems procesams. Modeliavimo programa (modelis) pati nustato šiuos pasikeitimus. Jei įvykis įvyksta, tai sistema aktyvuoja tik tuos procesus, į kurių jautrumo sąrašą yra įtraukti minėti įvykiai SystemC komponentai Duomenų tipai Be C++ savųjų duomenų tipu, SystemC dar palaiko aparatūrą apibrėžiančius duomenų tipus. Sprendimai dėl specialių duomenų tipų yra apibrėžiami duomenų pločiu, tikslumu ir operacija. Pasirinkimas atitinkamų duomenų yra svarbus, kadangi tai daro didele įtaką sintezavimo rezultatams. Duomenų tipai Sąrašas bendrųjų duomenų tipu Int tarp C++ ir SystemC Real, Char Bool Float Double Sąrašas aparatūrą apribojančių sc_bit Loginis bitas (0 arba 1) duomenų tipų sc_logic Daugiareikšmis duomenų tipas (0 1 X Z) sc_int<n> Sveikasis skaičius su fiksuotu žodžio ilgiu sc_bv<n> Loginis ilgio n Bit - vektorius sc_lv<n> Daugiareikšmis n ilgio Bit - vektorius Lentele Nr. 2 34
36 2.5.2 Moduliai ir sąsajos SystemC naudoja SC_MODULE makro aprašyti modulių klases. SC_MODULE(module name ) { modulio kūnas } SC_MODULE macro: #define SC_MODULE(module name ) struct module name : public sc_module Modulio kūnas susideda iš pasikartojančių elementų: kanalų, duomenų tipų, modulių objektų, sąsajų, konstruktorių, destruktorių, procesų ir pagalbinių funkcijų. Sąsajos yra įgaliojimų objektai, kurie susieti kanalais tiesiai su sąsaja. Moduliai komunikuoja su jų jungtimis. Jungtys aprašytos su skaitymo rašymo sąsaja: Sc_port<sc_signal_in_out_if <int>> rw_port ; //tas pats su numatyta suntakse sc_out<int> rw_port ; Įvykiai, jautrumo sąrašas, pranešimai Įvykis yra veiksmas inicijuojamas įrenginio arba vartotojo. SystemC įvykiai yra pagrindinis įrankis, sinchronizuoti skirtingus procesus. SystemC naudoja sc_event klases, kad modeliuotų įvykius. Įvykis yra elemento raktas į stimuliatoriaus darbo pasikeitimus. Įvykis neturi laiko tėkmės. Su įvykiais jūs galite atlikti tik du veiksmus: wait arba fire. Procesai yra aprašomi jautrumo sąrašu su vienu ar daugiau įvykių. Jei įvykis įvyksta, tai prasideda tą įvykį turinčių (pagal jautrumo sąrašą) procesų vykdymas. 35
37 Procesai Modeliavimo programa negali pilnai imituoti tikro funkcionavimo. Yra tam tikras modeliavimo laiko diskretas, pagal kurį modeliavimo programa modeliuoja sistemos būsenas tik tais fiksuotais laiko intervalais. Kiekvienas procesas apibrėžia įvykdymus mažomis programos fragmento porcijomis ir taip leidžia kontroliuoti kitus procesus. SC_THREAD: Gija aktyvuojama modeliavimo procesuose tik vieną kartą. Po to, kai gija startuoja, prasideda vykdymas. Vykdymą galima pristabdyt su wait metodu. SC_METHOD: skirtingai nei SC_THREAD negali savęs pristabdyti, jis įvykdomas iki galo. SC_METHOD yra konkretesnis nei SC_THREAD, todėl yra greičiau modeliuojamas. Kanalai ir sąsajos Signalai yra pakankama priemonė aprašyti sąsajas aparatūros procesuose, bet to nepakanka aprašyti visą sistemą. Kanaluose yra metodai skirti sąsajų aprašymui. Komunikacija yra galima tarp modulių ir modulių viduje. Modulį gali sudaryti keli procesai. Yra du skirtingi kanalų tipai - primityvus ir hierarchinis. Primityvūs kanalai negali susidėti iš procesų arba tiesiogiai komunikuoti su primityviais kanalais. RTL Funkcinis (TML) Algoritminiai sc_signal sc_fifo sc_mutex sc_semaphore sc_buffer C++ bendri Lentele nr. 3 Hierarchiniai kanalai: jie gali sudaryti labai sudėtingas komunikacijas, kadangi jie yra moduliai ir jie neturi aukščiau paminėtų apribojimų. Su hierarchiniais kanalais yra įmanoma modeliuoti abstrakčias komunikacines struktūras. 36
38 2.5.5 Aparatūros aprašymo kalbų vieta projektavimo procese Reikalavimai Tekstas / UML Algoritmų analizė C/C++ funkcinis SystemC Mindaugas Vytautas Architektūros analizė Transakcijų lygio systemc Verifikavimas PLS/SVA (neanaudojama) RTL modelis SystemC VHDL Verilog Užduotys Kalbos Pav. nr. 17 Modelio kūrimo kalbos ir užduotys. Modeliuojant sistemas reikalingi įvairūs įrankiai priklausomai nuo projektavimo stadijos. Projektavimo reikalavimams mes surinkome apklausos būdu. Surinktus reikalavimus mes užrašėme ant popieriaus. Darbe neanalizuojamos reikalavimų surinkimo problemos. Daugiau dėmesio yra skirta darbo algoritmų analizei, kaip juos perkelti į aparatūrą. Kad tai atliktume, mums teko apsispręsti, kokias kalbas naudosime. Paveikslėlyje nr. 17 pateikiama naudojamos kalbos. Algoritmų analizei naudojome C++ programavimo kalbą. Architektūros analizei naudojame transakcijų lygio SystemC. Magistriniame darbe mes daugiau kreipiame dėmesį į sistemų modeliavimą ir sintezavimą. Todėl magistriniame darbe neanalizuojame sistemos verifikavimo problemos, bet darbe yra atliekamas gautų rezultatų palygimas su funkcinio modelio rezultatais, aprašoma [8] Mindaugas analizuoja TLM modeliavimą (C++ kodo transformavimas į SystemC TLM aplinką). Vytautas analizuoja modelio sintezavimą (TLM transformavimas į sintezuojamą RTL aprašą). 37
39 2.5.6 TLM taikymas automatinam verifikavimui. Standartinis C++ badymo stendas Transaktorius Funkcinis modelis parašytas su C++ RTL Modelio teisingos reakcijo Transaktorius Palygintojas (comparator) RTL modelio reakcijos Pav. nr. 18 TLM panaudojimas automatinam sistemos verifikavimas, aprašoma [10]. Testų rinkinius, kurie buvo parašyti tikrinti C++ modeliu, gali būti panaudoti skirtingiems abstrakcijos lygiams tikrinti. Tam tikslui mes galime pasitelkti tranzaktorius. Tranzaktorius - tai toks modulis ar sąsaja, kurios pagalba galime prijungti skirtingo abstrakcijos lygio modelius. Prie tranzaktorių galime jungti susintezuotus modelius. Taip sutaupome laiko modelių patikrinimui, aprašoma [7]. 38

40 2.6 Funkciniai reikalavimai Mūsų pasirinkta sritis yra lazeriniai 3d skaneriai. Atitinkamai mes juos dar suskirstom į 2 dalis pagal skenavimo pobūdį: poslinkio ir pasisukimo kampo. Poslinkio atveju daiktas yra padedamas ant judančio takelio ir slenkant pro lazerį atitinkamai fiksuojami pjūviai. Tokiu būdu objektas yra tarsi pjaustomas kaip duona. Vėliau atvaizduojant išlaikomi tie patys atstumai ir daiktas sudedamas tarsi supjaustytos duonos riekės, išrikiuojamos ta pačia tvarka, kaip kad buvo pjaustomos (Pav.:19). Pav. nr. 19 Pasisukimo atveju daiktas yra padedamas ant besisukančio stalelio ir įtvirtinamas, kad nepasislinktų nuo esamos padėties. Taip gautas linijų masyvas yra supjaustomas tarsi tortas, vėliau atvaizduojant linijos sudedamos tokia pat tvarka(pav.:20). 39


41 Pav. nr.20 Kaip tai veikia: lazeris apšviesdamas paviršių ant paviršiaus palieka ryškų pėdsaką. Dėl to naudojant kamerą ir paėmus didelį kontrastą gauname vien tik lazerio apšviestų vietų liniją. Naudojamos kameros rezoliucija yra 640X480 (pav.:21 a ir b). a b Pav. nr. 21 Gauta kreivė dar nėra tiksli ir tikslumo dėlei skaičiuojame kiekvienam X yra perskaičiuojama reikšmė pagal gausą. Tokiu atveju vienai kreivei aprašyti gauname 640 taškų. Paprastumo dėlei koordinatės X nesaugojame, nes pagal šį principą tinklelis yra griežtai suskirstytas ir turi tik 640 skirtingų X reikšmių [0..639]. Taigi saugome vien tik aukščius Y 40
![taip gauname Y[0..639]. Kadangi 640 taškų nėra labai daug atvaizduoti glotniai kreivei, kreivės glotninimui planuojame naudoti splainus.](/docs-images/109/189032019/images/42-0.jpg "Įvertinant kameros kampą, bei kameros didinimo bei mažinimo parametrus (perspektyvą) kamerą judinant,gauname transformuotą vaizdą, kuris priklauso nuo 2 kampų α ir β (pav.:21). Pav. nr.")
42 taip gauname Y[0..639]. Kadangi 640 taškų nėra labai daug atvaizduoti glotniai kreivei, kreivės glotninimui planuojame naudoti splainus. Įvertinant kameros kampą, bei kameros didinimo bei mažinimo parametrus (perspektyvą) kamerą judinant,gauname transformuotą vaizdą, kuris priklauso nuo 2 kampų α ir β (pav.:21). Pav. nr. 22 Kampas α parodo, kokiu kampu yra pasukta kamera, o kampas β apsprendžia kameros mastelio nuo atstumo problemą. Kampo α keitimas kameroje duoda akivaizdžius pasikeitimus, tai matyti paveikslėliuose (pav.: 23 a ir b). Pav. nr. 23 a b 41
43 Kampas β yra reikalingas tik tuo atveju, jei norėsime susieti gautus išmatavimus su realiais, kitu atveju mes jį galime ignoruoti ir laikyti, kad mastelis mums visai nesvarbus (pav. 23 a ir b). Pav. nr. 24 a b Modeliavimui reikalingi specialiai paruošti duomenų failai. Jie turi būti surašyti tekstiniame formate. Duomenų failai turi saugoti nespalvotą vaizdą. Nespalvoto vaizdo gavimo algoritmas pateikimas pav. nr. 25 CCD nespalvota Raudona Žalia Raudona Duomenų gavimas CCD Spalvota Raudona Žalia Raudona Konvertavimas Duomenų gavimas Pav. nr. 25 Spalvoto vaizdo konvertavimo į nespalvotą algoritmas. 42
 = formulė (1) 3 Pav. nr.")
44 Paveiksliuke 25 Pateiktas duomenų konvertavimo įrenginys skaičiuoja duomenis naudodamasis formulė (1) Naudojami koeficientai yra spalvos pikselių reikšmės, raudona, žaliai ir mėlyna, jos skaičiuojamas vidurkis, taip gaunamas nespalvotas vaizdas. R + G + B F duomemys ( R, G, B) = formulė (1) 3 Pav. nr. 26 a b Paveiksliuke 26 pateikiami konvertavimo iš spalvoto vaizdo į juodai baltą, a pateikiamas spalvotas, b juodai baltas. 2.8 Nefunkciniai reikalavimai Užtikrinti tikslesniems rezultatams abiem atvejais reikalaujama, kad daiktas tiek slinkimo atveju, tiek sukimosi, būtų gerai prigludęs prie paviršiaus, tobuliausiu atveju netgi priklijuotas, ar prilipintas. Nesant tam net ir silpnos vibracijos įtakoja duomenų iškraipymą ir gaunami rezultatai nėra tikslūs. Mūsų kuriamas įrenginys kol kas nėra labai patogus. Įtakos tam turi ir tai, kad iki šiol dar nežinomas galutinio produkto dizainas. Kol kas įrenginiai naudoja pakankamai daug vietos atsižvelgiant į tai, kokio dydžio objektus skenuojame. Mat bent jau besisukančio apie ašį skenerio ilgis šio metu siekia apie metrą. Tuo tarpu skenuojami objektai yra tik apie ~7 cm 3 tūrio. Taigi logiška būtų, jeigu baigtas produktas užimtų ne daugiau ~20 cm 3 tūrio. Skenuojami objektai taip pat turi būti lazerį atspindinčios spalvos. Kol kas skenuojamų objektų greitis yra iki 1 min. Norint naudoti mūsų produktą, kompiuteris turi turėti grafinę plokštę su 128 MB atminties, pagrindinis procesorius turėtų būti Pentium 4 klasės arba geresnis, arba AMD Athlon 2,2+ klasės procesorius arba geresnis, turėti nemažiau kaip 512 MB operatyviosios atminties, 40 GB kietasis diskas arba talpesni modeliai. Sistemos modeliu reikalaujama Windows tipo operacinė sistema, rekomenduojama Windows XP SP1 arba naujesnės jos versijos. Saugumo aspektu tai visai nėra pavojinga, vienintelis kiek nors kenkiantis įrenginys yra lazeris, dirbant su lazerinėmis sistemomis yra taikomos joms skirtos saugumo priemonės, 43
45 tai yra specialūs akiniai. Kontrolės reikalavimai yra tik tokie, kad pradžioje patartina gerai susireguliuoti kamerą ir lazerį. Mat pasisukimo atveju per sukimosi centrą būtinai turi eiti lazerio linija. Taip pat lazerio linija turi būti statmena staliukui. Sistemos modelis yra parašytas naudojantis c++ programavimo kalba. Šiuo metu jis yra pririštas prie Windows operacinės sistemos. Bet kodas yra universalus naudojantis bet kurios kitos operacinės sistemos, kurioje yra bent vienas c++ kompiliatorius. Sunkumai, kuriais galime susidurti yra perkeliamas vartotojo sąsajos ir naudojamos SDK (Programinės įrangos kūrimo įrankiu) perkėlimas į kitas operacines sistemas. Taip pat nerandant būdų arba galimybių perkeliant naudojamas SDK į kitas sistemas gali tekti naudotis kitomis egzistuojančiomis sistemomis, bet tai galbūt gali būti atlikti žymiai lengviau negu iš pirmo žvilgsnio atrodo. Sistemai taikomi reikalavimai, kad ji veiktų ant Windows tipo sistemų, todėl šiuo metu nėra rūpinimąsi, kad sistema veiktų ir ant kitų operacinių sistemų. SystemC modeliams reikalingas kompiuteris, kuris turi: Pentium 4 tipo procesorių 512 MB darbinės atminties, 40 GB kietasis diskas, Windows arba Linux šeimos operacinę sistemą. 44
46 3 Projektinė dalis 3.1 Bendros perėjimo tarp C++ ir SystemC (TLM ir RTL) taisyklės C++ transfomavimas SystemC apribojimai Sintezuojamas aprašas Problema1 Problema2 Pav. nr. 27 Perėjimo problemos Perėjimas nuo C++ funkcinio modelio į SystemC modelį ( Problema1 ) sprendžia Mindaugas. Modelio transformavimas į sintezuojamą modelį ( Problema2 ) analizuoja Vytautas. Bendros perėjimo tarp C++ ir SystemC (TLM ir RTL) taisyklės Pradinėse specifikacijose mes turime funkcinį sistemos modelį, kurį turime transformuoti į sisteminį aprašą. Naudojantis transakcijų lygio SystemC, mes turime nuspręsti, kokia bus sistemos struktūra. Pagrindinė problema yra pasirenkant, kuriuos kintamuosius kelsime, į kokius blokus t.y. naudojamus masyvus kelsime į atminties elementus, ar juos paliksime moduliuose ir naudosime kaip registrus. Visi atminties elementai turi būti pririšti prie magistralių, todėl reikia pasirinkti: Kiek naudosime magistralių. Kiek sistema turės atminties. Kiek procesų sistemoje bus. Kokie bus procesai. Kaip mes juos valdysime. RTL ir TLM aprašai skiriasi iš esmės. Todėl procesų valdymo sistema negali vienareikšmiškai sutapti su RTL aprašuose naudojamais metodais, bet patį principą kaip mes valdysime procesus, mes galime perkelti. 45
47 Keisdami TLM modelyje architektūrą mes sutaupome laiko, nes perkoduoti žemo lygio modelius užtrunka ilgiau, todėl modelių architektūrą mes turėtume keisti pradinėse projekto stadijose. Funkcinis C++ aprašas TLM modelio aprašas #include <iostream> int kintamasis1 void funkcija1() {.. } void funkcija2() struct Initiator: sc_module, tlm::tlm_bw_b_transport_if{ tlm::tlm_b_initiator_socket<> socket; SC_CTOR(Initiator) : socket("socket"), dmi_ptr_valid(false) // DMI sąsaja { socket.bind( *this ); {.. SC_THREAD(process); } } virtual void b_transport( tlm::tlm_generic_payload& trans ) int main () { funkcija1(); funkcija2(); { tlm::tlm_command cmd = trans.get_command(); sc_dt::uint64 adr = trans.get_address() ; unsigned char* ptr = trans.get_data_ptr(); } unsigned int len = trans.get_data_length(); bool* byt = trans.get_byte_enable_ptr(); unsigned int wid = trans.get_streaming_width();... } } Lentele. nr. 4 C++ ir TLM kodo pavyzdžiai. Transformuojant modelius skaičiavimo algoritmai nesikeičia, keičiasi su duomenų nuskaitymo įrašymu susijusios funkcijos ( wait, duomenų nuskaitymo įrašymui ir nuskaitymui naudojama DMI sąsaja). 46
48 Funkcinis C++ aprašas TLM modelio aprašas if(linija[i]!= 480){ if( *(reinterpret_cast<int*>( &dmi_data.dmi_ptr[(k- Yp = linija[i]; >getmaxadrees() + i) * 4] ))!= 480){ if(i>1) Yp = *(reinterpret_cast<int*>( &dmi_data.dmi_ptr[(k- DY = linija[i]- >getmaxadrees() + i) * 4] )); linija[i-1]; wait( dmi_data.read_latency); wait( dmi_data.read_latency); } if(i>0) DY = *(reinterpret_cast<int*>( &dmi_data.dmi_ptr[(k- >getmaxadrees() + i) * 4] )) - *(reinterpret_cast<int*>( &dmi_data.dmi_ptr[(k- >getmaxadrees() + i -1 ) * 4] )); wait( dmi_data.read_latency); wait( dmi_data.read_latency); } Lentele. nr. 5 C++ ir TLM kodo pavyzdžiai. Pagrindiniai skirtumai naudojantis TLM Funkcinis C++ aprašas int masyvas[10][10]; TLM modelio aprašas class Memory: sc_module, tlm::tlm_fw_b_transport_if<>{ public: DMI mode tlm::tlm_b_target_socket<> socket; enum { SIZE = 100 }; const sc_time LATENCY; int mem[size]; SC_HAS_PROCESS(Memory); Memory(sc_core::sc_module_name name); ~Memory(); virtual void b_transport( tlm::tlm_generic_payload& trans ); virtual bool get_direct_mem_ptr( const sc_dt::uint64& address, tlm::tlm_dmi_mode& dmi_mode, tlm::tlm_dmi& dmi_data); void invalidation_process(); 47
49 virtual unsigned int transport_dbg(tlm::tlm_debug_payload& dbg); }; Lentele. nr. 6 C++ ir TLM atminties pavyzdžiai. Pagrindinis skirtumas rašant paprastą algoritmą su TLM yra naudojami jau prie aparatūros pririšti moduliai. Šiuo atveju lentelėje nr. 6 pateikiamas paprasto masyvo transformavimas į TLM atminties modulį. Visas komunikavimas vyksta per tam skirtus modulius socket arba per specifines sąsajas ( DMI ). Nepanaudodami šių modulių ir sąsajų, mes tiesiog modeliuojame paprastą modelį, kuris neduoda mums jokios informacijos ir yra nenaudingas tolimesniuose modeliavimo žingsniuose. Apytikrio laiko (approximately-timed) modeliavimas atliekamas naudojantis wait sakiniais. Šie sakiniai yra konfigūruojami pagal pasirinktą architektūrą. aprašoma [8] C++ SystemC bool paprastas_pavizdys SC_MODULE(paprastas_pavizdys) (bool A, bool B) { sc_in <bool> A; { bool C; sc_in <bool> B; C = A + B sc_out <bool> C; Return C; SC_CTOR (paprastas_pavizdys) } { SC_MODULE(process); Sensitive << A<<B; } Void process() { C = A.read()+B.read(); } C++ metodai (void, bool, int, float ir kiti ) transformuojami į SystemC modulius C++ atsinešami duomenys (A ir B) atitinka SystemC modulio įėjimus (sc_in) C++ metodai būna 3 rūšių : funkciniai (grąžinantys vieną reikšmę (bool, in, float)) nefunkciniai negrąžinantys reikšmių 48
50 C++ funkcinis metodas pereinant į SystemC tampa kaip išėjimu (sc_out) SC_MODULE apibendrina tam tikrą modulių SC_METHOD dalį turintį savus įėjimus ir išėjimus SystemC SC_METHOD yra panašu į SC_MODULE, bet negalintis savyje turėti kitų metodų. SC_CTOR - tai konstruktorius, kuriame sudedami metodai (SC_METHOD) gijos (SC_THREAD) ir procesai (SC_PROCESS) taip pat prie kiekvieno iš jų yra parašomas jautrumo sąrašas, kuris juos aktyvuoja. C++ sudėtingesniems algoritmams prieš transformuojant į SystemC reikia sukurti būsenų diagramas, kurios pilnai atitiktų sistemos funkcionavimą. Duomenų tipai Float, double Nepalaikomas dėl to reikia keisti į uint <n> Int Int tipas palaikomas, bet rekomenduojama apsiskaičiuot maksimalią reikšmę ir naudoti uint<n> tipą bool Palaikomas, bet jei tai įėjimas kartais geriau naudoti sc_in_clk Lentele. Nr. 7 49
51 3.2 C++ modelio transformacija į sisteminį modelį C++ Modelis Nuskaitymas Filtravimas Kreives analize Duomenų nuskaitymas iš kameros Gausian filtro generavimas Fitravimas Kreives pajieška Kreives interpoliavimas Pav. nr. 28 C++ modelio laiko diagrama. Analizuojama modelio laiko diagrama. Pradiniuose laiko momentuose vyksta du procesai t.y. Duomenų nuskaitymas ir Gausian filtravimo masyvo generavimas. Gausian filtras yra generuojamas tik vieną kartą, jei mes atliekame antrą iteraciją jo perskaičiuoti nereikia. Taip pat Gausian filtras gali būti užkraunamas iš failo, tokiu atveju jo generuoti nereikia. Kai baigiasi paveikslėlio užkrovimas, mes galime pradėti filtravimą. Tol kol filtruojame paveikslėlį, negali būti atliekami kiti veiksmai. Turint nufiltruotą paveikslėlį, galime atlikti kreivės paiešką. Kai gauname kreivę, mes ją interpoliuojame. Algoritmo pabaiga. Galime pradėti sekančią iteraciją. 50
52 Paveikslėlio atmintis Duomenų failas (paveikeslėlis) Duomenų nuskaitymas Duomenų saugojimas Vaizdo filtravimas Interpoliuotos kreives duomenų failas Duomenų saugojimas Kreivės interpoliavimas Kreivės pajiška Kreivės atmintis Pav. nr. 29 Sistemos modelio duomenų srauto diagrama. Analizuojama modelio duomenų srautų diagrama. Kad pradėtų veikti algoritmas, mums reikalinga turėti duomenis. Taigi mes nusiskaitome iš duomenų failo arba kameros. Toliau vyksta duomenų išsaugojimas atmintyje. Kai turime duomenis, galime juos analizuoti tai yra juos filtruoti. Turėdami nufiltruotus duomenis, mes pradedame kreivės paiešką. Gauta kreivę saugome atmintyje. Iš gautų kreivės duomenų, mes skaičiuojame interpoliuotą kreivę. Gautą kreivę mes išsaugome duomenų faile, kad vėliau galėtume vaizduoti ekrane. Pav. nr. 30 Mišri diagrama (Modelio klasių diagrama) aprašoma [3]. 51
53 3.3 Atskirų modelio dalių diagramos Algoritmų aprašymai ir diagramos Duomen ų failas Kamera naudojanti s IC duomenų nuskaitym o sąsaja Duomenų nuskaitymas Duomenų saugojimas Atmintis Duomenų šaltinis (sisteminiam ir funkciniam modeliams) Pav. nr. 31 Duomenų nuskaitymo duomenų srauto diagrama. Duomenų nuskaitymo diagrama pateikia informaciją apie duomenų judėjimą nuskaitant duomenis. Priklausomai nuo modeliavimo stadijos (gali būti funkcinis modeliavimas arba sisteminis) mes pasirenkame duomenų šaltinį, iš kurio gausime duomenis. Kadangi naudojamos IC duomenų gavimo klasės yra palaikomos tik Windows operacinėje sistemoje, tai modeliuojant sisteminį modelį ant Linux sistemos, yra būtinas kitas duomenų įvedimo būdas. Gauti duomenys yra išsaugomi atmintyje. Filtravimas Kaip pagrindinis filtravimas darbe yra naudojamas,,gausianinis filtras. Ref. {1},,Gausianinis filtras gali panaikinti triukšmą paveikslėlyje, taip gaunamas išlietas paveikslėlis. Tai yra pasiekiama manipuliuojant pikselių reikšmėmis naudojantis kauke. Pavyzdyje yra pateikiama kaukė naudojanti 7x7 dydžio matricą. Kaukės koeficientai yra apskaičiuojami naudojantis formule (2) h ( x + y σ ( x, y) = e σ 2 π 2 2 ) formulė (2) Formulėje h(x, y) nustato matricos reikšmes matricoje (kaukėje). Sigma yra konstanta (pavyzdyje yra naudojama reikšmė lygi 1). Gauta matrica pateikiama paveikslėlyje 16 su normalizuotomis reikšmėmis iki 1. 52

54 Pav. nr. 32 Paveikslėlyje naudojama matrica yra naudojama sugeneruoti naują paveiksliuką. Ant kiekvieno paveikslėlio taško arba pikselio yra uždedama išcentruota matrica tai yra x= 0, ir y = 0. Visi 48 pikseliai, kurie patenka į matricos apglėbiamą erdvę yra sudauginami su matricos koeficientais ir visos reikšmės yra sudedamos. Gauta reikšmė yra vidurkinama ir gaunamas naujo paveiksliuko pikselis. Viso aprašyto proceso iliustracija yra pateikiama 17 paveikslėlyje. Pav.nr. 34. Gauti rezultatai pateikiami paveikslėlyje

















55 Pav. nr. 35 a b prieš filtravimą b) po filtravimo. Pav. nr. 36 Filtravimo algoritmo loginė diagrama. 54
56 Kreivės radimas. Pradžia Eiti per visus vaizdo stulpelisu Ciklo pabaiga Pabaiga Ciklas Eiti per viena pasirinkta vaizdo stulpeli Ciklas Ne Ar buvo fiksuota lazerio pradžiz Taip Ciklo pabaiga Ar pikselis yra šviesesnis negu numatyta Taip Ar pikselis yra tamsesnis negu numatyta Taip Fiksuoti lazerio pradžią Fiksuoti lazerio pabaigą Nutraukti ciklą Saugoti suskaičiuotą reikšmę Skaičiuoti rasto lazerio viduri Taip Ar buvo rastas lazeris Saugoti kreivės reikšmę 480" Ne Pav. nr. 37 Kreivės radimo algoritmas. Kreivės radimo algoritmas yra pateiktas naudojantis blokinėmis loginėmis schemomis. 55
57 Algoritmas analizuoja vaizdo stulpelius. Eidamas per vaizdo stulpelius jis ieško lazerio pradžios taško. Radęs pradžios tašką jį išsisaugo atmintyje. Po pirmo taško suradimo yra ieškomas lazerio pabaigos taškas. Jei buvo nerastas lazerio pradžios taškas ir mes perėjome per visą stulpelį, tai į atmintį įrašomas paveikslėlio paskutinio taško indeksas t.y. įrašoma reikšme lygi 480. Jei buvo rastas lazeris, tai į atmintį įrašomas lazerio vidurio taškas. Jis apskaičiuojamas atimant lazerio pabaigos taško indeksą iš lazerio pradžios indekso, tada gauname lazerio plotį. Gautą lazerio plotį padaliname iš dviejų ir gauta reikšmė atitinka pusei lazerio pločio. Pridedant pusę lazerio pločio prie lazerio pradžios indekso gauname indeksą, kuris parodo, kuriame taške yra lazerio vidurys. Taip einame per visus paveikslėlio stulpelius, kol pasiekiame paveikslėlio pabaigą. Interpoliavimo algoritmo aiškinimo schema Pav.nr 38 skaičiavimo formulė sudaryta naudojant pav.38, aprašoma [1] kintamųjų aprašymas Δx -x pokytis tarp 2 taškų (mūsų atveju visada pastovus dydis) Δy -y pokytis tarp dviejų taškų Δx2 - x pokytis, kol nėra reikšmių Δy2 - y pokytis, kol nėra reikšmių 56
58 kiekis- skaičius taškų, kurie neturi reikšmės k1,k2 - krypties koeficientai naudojamos formulės Δx k1 = Δy (1) Δx2 k2 = Δy2 (2) Δy 2 = y n y p (3) k1 k2 kx = 2 (4) Δy n = Δy2 + kx (5) y p+1 = y p + Δyn (6) Algoritmo veikimas Algoritmo idėja tame, kad kol nėra reikšmių, paimamas prieš tai buvęs krypties koeficientas (pagal 1 formulę) ir naujas krypties koeficientas, kuris gaunamas tarp paskutinio turimo duomens ( y ) ir pirmo vėl esamo ( y ) (kaip parodyta 2 formulėje). p n Šiuo atveju Δx2 galime apskaičiuoti įsivedant papildomą kintamąjį (kiekis ), kuris nusako kiek taškų trūksta, tai apskaičiuojama pagal 3 formulę. Skaičiavimo esmė tokia: skaičiuojame naują krypties koeficientą kiekvienam naujam taškui, kuris apskaičiuojamas pagal 4 formulę. Toliau skaičiuojame naują y pokytį, kuris apskaičiuojamas pagal 5 formulę, taigi nauja taško reikšmė gaunama iš 6 formulės. Suoptimizavus, matematinė išraiška gaunama tokia: (2 kiekis 1) y p + yn y i][ j] = Δy 2 kiekis [ (7) toliau matyti pav.39 algoritmas 57

59 Pav. nr. 39 Interpoliacijos algoritmo loginė schema C++ pradinės specifikacijos modelis 58
60 Transformavimo algoritmo aiškinimo schema Pav. Nr. 40 gautas vaizdas tiesiai i kamerą Pav.Nr. 41 transformavimo algoritmo schema Transformavimo koeficiento skaičiavimui naudojame kubą. Reikalingas tik vienas taisyklingas kubo pjūvis, kuris mums bus reikalingas. Taip gauname pjūvį, kuris yra transformuotas dėl kameros pozicijos (pav.x1). Mūsų uždavinys gauti (pav.x2) parodytą vaizdą ir suskaičiuot koeficientą, kuris įvertintų kameros kampą. Norėdami apskaičiuot šį koeficientą, turime gauti kai kuriuos duomenis: minimalią (Min_y) ir maksimalią (Max_y) y reikšmę ir bei x1 ir x2 reikšmę, kurios apsprendžia kubo šoninių sienelių poziciją X ašyje. 59
61 Žinodami tikrą nuskenuoto daikto formą, galime atkurti jį. Šiuo atveju skenuojamas kubas ir dėl to turėtumėm gauti kvadratą. Nuskenavę gauname stačiakampį gretasienį, kuris turi būti transformuotas į kubą. Skaičiuojame Δ x ir Δ y pokyčius, kurie nusako kraštinių ilgius. Kvadrato atveju Δx = Δy, taigi jei ši sąlyga yra netenkinama reikia skaičiuot nukrypimo koeficientą k. Jam apskaičiuot naudojamos formulės Δ x = x2 x1; (8) Δ y = Max _ y Min _ y; (9) k Δx x2 x1 = = ; (10) Δy Max _ y Min _ y Turint koeficientą k vėliau reikia transformuoti visas Y koordinatės reikšmes. Tai padaroma esamą reikšmę dauginant iš nukrypimo koeficiento. y = [ i][ j] k * y[ i][ j] ; 60
62 Pav. nr. 42 transformavimo koeficiento skaičiavimo algoritmas 61
63 Start back i<m+1 Exit loop exit run i++ Y[i][j] = k*y[i][j] Pav. nr. 43 transformacijos algoritmas Sisteminiai modeliai Pav. nr. 44 TLM sistemos s blokinė schema Pav. nr. 45 TLM modelio procesų diagrama. Pateikiamas TLM sisteminis modelis. Filtravimas, kreivės radimas, interpoliavimas yra prijungti prie sistemos magistralių. Visi anksčiau išvardinti moduliai ir atminties blokai sudaro sistemą. Duomenų įvedimas ir nuskaitymas yra pagalbiniai blokai, kurie naudojami testuojant sistemą. Duomenų išvedimas naudojamas duomenų išvedimui į failą. Filtravimo, kreives radimo bei interpoliacijos algoritmai yra buvo pateikti anksčiau ataskaitoje. Naudojamas duomenų blokas yra vientisas ilgas masyvas, kuris yra perskaičiuojamas naudojant pagalbinę klasę. Paveikslėlis yra saugomas nuo nulinio iki elemento (t.y. 62
64 paveikslėlio dydis 640 padaugintas iš 480 lygu ). Nuo iki elemento yra saugomi kreivės duomenys. Paveikslėlio matricos indekso transformavimas į masyvo indeksą atliekamas pagal formulę. Masyvo indeksas lygu stulpelis padaugintas iš eilutes maksimalios reikšmės ir pridėta eilutė. Atminties blokas InOut RnW_in CLK Clock_ out Clock in Nustaymas i pradine busena RnW out Darbine busena Address in Pradiniai nustatymai Reset out Reset in Duomenu trukumas Address out Data new in nuskaitymas Data out Data in Duomenu užpildymas Data_ new out rašymas Naujo pokycio apskaiciavima s pabaiga Duomenu failas Rezultatu failas Pav. Nr. 46 RTL Procesų diagrama SystemC RTL aprašas susideda iš bandymo stendo(testbech) ir interpoliacijos algoritmo modelių. Pav.x parodyta procesų bendravimo schema. Bandymo stendas ir interpoliacijos algoritmas vyksta lygiagrečiai. Bandymo stendas pradedamas vykdyti nuo pradinių nustatymų. Pradinių nustatymų metode yra įrašomas reset signalas, taip pat ten gali būti įrašoma nauja duomenų reikšmė rankiniu būdu. Toliau seka duomenų nuskaitoma iš failo. Nuskaitomi duomenys yra surašomi į 63
 Address adresas arba indeksas į atitinkamą atminties vietą Data_new nauja duomenų reikšmė, kuri turi būti įrašyta į atmintį Clk")
65 atminties bloką. Iš atminties bloko galima nuskaityti ir pakeisti saugomus duomenis. Šiuo atveju tai atlieka CLK procesas. Į CLK procesą ateina signalai: RnW -(skaitymas =1 ar rašymas =0) Address adresas arba indeksas į atitinkamą atminties vietą Data_new nauja duomenų reikšmė, kuri turi būti įrašyta į atmintį Clk procesas taip pat generuoja sinchronizacijos signalą. Rašymas į failą vyksta po to, kai interpoliacijos algoritmas baigia darbą. Interpoliacijos algoritmą RTL lygyje geriausiai galima įsivaizduoti kaip būsenų automatą. Tam reikia gana gerai išmanyti patį algoritmą ir sugebėti jį sudalinti į atskiras būsenas. Šiuo atveju gautas automatas atrodo taip kaip parodyta pav. 47 Pav. Nr. 47 RTL automato būsenų diagrama Automatas pradeda veikti, kai reset reikšmė lygi 0. darbinėje būsenoje automatas tikrina, ar atėję duomenys yra teisingi, ir jei jie teisingi, tada skaičiuojamas pokytis tarp esamos reikšmės ir prieš tai buvusios. 64

66 Atėjus duomenų reikšmei 480 automatas peršoka į kitą būseną ir skaičiuoja kiekį trūkstamų duomenų. Suskaičiavus visus trūkstamus duomenis automatas pereina į duomenų užpildymo būseną. Duomenų užpildymo būsenoje yra perskaičiuojamos trūkstamos reikšmės pagal sugalvotą interpoliacijos algoritmą. Kai visos trūkstamos duomenų reikšmės yra užpildytos, automatas peršoka į naujo pokyčio apskaičiavimo būseną. Tačiau jei adreso skiltis pasiekia 640 reikšmę, automatas baigia darbą ir peršoka į pabaigos būseną. Naujo pokyčio apskaičiavimo būsena yra skaičiuojama tik vieną kartą, todėl po jos iškart seka darbinė būsena. Pabaigos būsenoje automatas nieko nedaro tik išlaiko esamą būseną 4.Eksperimentinė dalis 4.1 Eksperimentų rezultatai Šiame skyrelyje yra pateikti: Testinio paveikslėlio filtravimo rezultatai Kreivės radimo iš testinio paveikslėlio rezultatai Kreivės interpoliacijos rezultatai Šių rezultatų gavimui buvo panaudota modeliuojama pradine specifikacija C++ kalboje Testinio vaizdo filtravimo rezultatai a)nefiltruotas paveikslėlis b) C++ filtruotas pav. c) TLM modelio filtruotas pav. Pav. nr. 48 paveikslėlio filtravimo rezultatai. 65
 yra nefiltruotas vaizdas gautas iš skaitmeninės kameros (CCD kameros), kaip")

 kreivė gauta iš C++ modelio, b) C++ modelio kreivė pavaizduota ant")
67 Paveikslėlyje numeris 48 yra pateikiama duomenų pavyzdžiai. Pav. 48 a) yra nefiltruotas vaizdas gautas iš skaitmeninės kameros (CCD kameros), kaip matome b ir c paveikslėliai yra identiški Kreivės radimo algoritmo rezultatai Mes kreivę ieškome iš paveikslėlio, taigi pradiniai duomenys yra paveikslėlis pateikiamas prieduose. a) b) c) Pav. nr. 49 Gauta kreivė, a) kreivė gauta iš C++ modelio, b) C++ modelio kreivė pavaizduota ant paveiksliuko, c) kreive gauta iš TLM modelio (pavaizduota ant paveikslėlio). 66
 b) c) d) Pav.nr.")
 TLM modelio")
68 4.1.3 Interpoliacijos algoritmo rezultatai Pradiniai duomenys a) b) c) d) Pav.nr. 50 a) pradiniai duomenys, b) C++ modelio rezultatai, c) C++ modelio rezultatai perkelti ant paveiksliuko, d) TLM modelio rezultatai pavaizduoti ant paveiksliuko. 67

69 4.1.4 Sintezės rezultatai class Cba_core GSCLib Įėjimų skaičius Tinklų skaičius Ventilių skaičius Skirtingų ventilių skaičius Bendras ventilių plotas Apjungtas plotas Neapjungtas plotas energija uw mw mw Trigerių skaičius Duomenų atvykimo laikas Lentelė nr.8 0,97 r 0,86 r 0,21 r Pav. nr. 51 Modeliavimo rezultatai RTL 68

70 Pav. nr. 52 sintezuotas SystemC interpoliacijos algoritmas 69

71 Sintezuoto modelio atskirų blokų dalys a) Schemos simbolis b) Sintezuota schema Pav. nr. 53 sintezuoto modelio atskira dalis 70

72 a) Schemos simbolis b) Sintezuota schema Pav. nr. 54 sintezuoto modelio atskira dalis 71
VERSLO IR VADYBOS TECHNOLOGIJŲ PROGRAMA
 PATVIRTINTA Lietuvos Respublikos švietimo ir mokslo ministro 2007 m. rugsėjo 6 d. įsakymu Nr. ISAK-1790 VERSLO IR VADYBOS TECHNOLOGIJŲ BENDROJI PROGRAMA MOKINIAMS, BESIMOKANTIEMS PAGAL VIDURINIO UGDYMO
PATVIRTINTA Lietuvos Respublikos švietimo ir mokslo ministro 2007 m. rugsėjo 6 d. įsakymu Nr. ISAK-1790 VERSLO IR VADYBOS TECHNOLOGIJŲ BENDROJI PROGRAMA MOKINIAMS, BESIMOKANTIEMS PAGAL VIDURINIO UGDYMO
Projektas „Europos kreditų perkėlimo ir kaupimo sistemos (ECTS) nacionalinės koncepcijos parengimas: kreditų harmonizavimas ir mokymosi pasiekimais gr
 nacionalinės koncepcijos parengimas: kreditų harmonizavimas ir mokymosi pasiekimais gr") Studijų programos aprašas Studijų programos pavadinimas Informatika Aukštojo mokslo institucija (-os), padalinys (-iai) Vilniaus universitetas, Matematikos ir informatikos fakultetas, Informatikos katedra
Studijų programos aprašas Studijų programos pavadinimas Informatika Aukštojo mokslo institucija (-os), padalinys (-iai) Vilniaus universitetas, Matematikos ir informatikos fakultetas, Informatikos katedra
Layout 1
 Kvalifikacijos kėlimo kursų programos Pneumatika Pneumatikos pagrindai mašinų operatoriams P100 Suteikite savo mašinų operatoriams įgūdžių optimalaus darbinio slėgio nustatymui, oro pratekėjimų (nuostolių)
Kvalifikacijos kėlimo kursų programos Pneumatika Pneumatikos pagrindai mašinų operatoriams P100 Suteikite savo mašinų operatoriams įgūdžių optimalaus darbinio slėgio nustatymui, oro pratekėjimų (nuostolių)
DĖL APLINKOS IR SVEIKATOS MOKSLO KOMITETO ĮSTEIGIMO
 LIETUVOS RESPUBLIKOS SVEIKATOS APSAUGOS MINISTRAS ĮSAKYMAS DĖL LIETUVOS RESPUBLIKOS SVEIKATOS APSAUGOS MINISTRO 011 M. KOVO D. ĮSAKYMO NR. V-199 DĖL LIETUVOS HIGIENOS NORMOS HN 80:011 ELEKTROMAGNETINIS
LIETUVOS RESPUBLIKOS SVEIKATOS APSAUGOS MINISTRAS ĮSAKYMAS DĖL LIETUVOS RESPUBLIKOS SVEIKATOS APSAUGOS MINISTRO 011 M. KOVO D. ĮSAKYMO NR. V-199 DĖL LIETUVOS HIGIENOS NORMOS HN 80:011 ELEKTROMAGNETINIS
RR-GSM_IM_LT_110125
 Retransliatorius RR-GSM Įrengimo instrukcija Draugystės g. 17, LT-51229 Kaunas El. p.: info@trikdis.lt www.trikdis.lt Retransliatorius RR-GSM perduoda priimtus pranešimus į centralizuoto stebėjimo pultą
Retransliatorius RR-GSM Įrengimo instrukcija Draugystės g. 17, LT-51229 Kaunas El. p.: info@trikdis.lt www.trikdis.lt Retransliatorius RR-GSM perduoda priimtus pranešimus į centralizuoto stebėjimo pultą
EUROPOS KOMISIJA Briuselis, C(2017) 4679 final KOMISIJOS ĮGYVENDINIMO SPRENDIMAS (ES) / dėl bendros sistemos techninių standa
 4679 final KOMISIJOS ĮGYVENDINIMO SPRENDIMAS (ES) / dėl bendros sistemos techninių standa") EUROPOS KOMISIJA Briuselis, 2017 07 11 C(2017) 4679 final KOMISIJOS ĮGYVENDINIMO SPRENDIMAS (ES) /... 2017 07 11 dėl bendros sistemos techninių standartų ir formatų, kad EURES portale būtų galima susieti
EUROPOS KOMISIJA Briuselis, 2017 07 11 C(2017) 4679 final KOMISIJOS ĮGYVENDINIMO SPRENDIMAS (ES) /... 2017 07 11 dėl bendros sistemos techninių standartų ir formatų, kad EURES portale būtų galima susieti
Logines funkcijos termu generavimo algoritmas pagristas funkciniu modeliu
 KAUNO TECHNOLOGIJOS UNIVERSITETAS INFORMATIKOS FAKULTETAS PROGRAMŲ INŽINERIJOS KATEDRA Tomas Žemaitis LOGINĖS FUNKCIJOS TERMŲ GENERAVIMO ALGORITMAS PAGRĮSTAS PROGRAMINIO PROTOTIPO MODELIU Magistro darbas
KAUNO TECHNOLOGIJOS UNIVERSITETAS INFORMATIKOS FAKULTETAS PROGRAMŲ INŽINERIJOS KATEDRA Tomas Žemaitis LOGINĖS FUNKCIJOS TERMŲ GENERAVIMO ALGORITMAS PAGRĮSTAS PROGRAMINIO PROTOTIPO MODELIU Magistro darbas
Individualus projektas Programa TE-PM, TE-PS, TE-SL, TEstream 4, TEstream 6, TEstream 8, TEstreamOBD 4, TEstreamOBD 6, TEstreamOBD 8 sistemų naudotoja
 Individualus projektas Programa TE-PM, TE-PS, TE-SL, TEstream 4, TEstream 6, TEstream 8, TEstreamOBD 4, TEstreamOBD 6, TEstreamOBD 8 sistemų naudotojams Alternatyvus valdymo pultas telefone ViPGaS programos
Individualus projektas Programa TE-PM, TE-PS, TE-SL, TEstream 4, TEstream 6, TEstream 8, TEstreamOBD 4, TEstreamOBD 6, TEstreamOBD 8 sistemų naudotojams Alternatyvus valdymo pultas telefone ViPGaS programos
PRIEINAMAS TURIZMAS-TURIZMAS VISIEMS UNIVERSALUS DIZAINAS: TEORIJA IR PRAKTIKA
 PRIEINAMAS TURIZMAS-TURIZMAS VISIEMS UNIVERSALUS DIZAINAS: TEORIJA IR PRAKTIKA RAMUNĖ STAŠEVIČIŪTĖ ARCHITEKTĖ KU DOCENTĖ 2018.10.18, KLAIPĖDA UNIVERSALUS DIZAINAS TAI TOKS GAMINIŲ IR APLINKOS KŪRIMAS (PROJEKTAVIMAS),
PRIEINAMAS TURIZMAS-TURIZMAS VISIEMS UNIVERSALUS DIZAINAS: TEORIJA IR PRAKTIKA RAMUNĖ STAŠEVIČIŪTĖ ARCHITEKTĖ KU DOCENTĖ 2018.10.18, KLAIPĖDA UNIVERSALUS DIZAINAS TAI TOKS GAMINIŲ IR APLINKOS KŪRIMAS (PROJEKTAVIMAS),
Nexa serija Stūmokliniai ir hidrauliniai dozavimo siurbliai su dviguba diafragma UAB Elega, Žalgirio , Vilnius, LT 08217, Lietuva, Tel:
 Nexa serija Stūmokliniai ir hidrauliniai dozavimo siurbliai su dviguba diafragma UAB Elega, Žalgirio 131-211, Vilnius, LT 08217, Lietuva, Tel: +370 5 2 715444; tel./faksas: +370 5 2 715445; mob. tel.:
Nexa serija Stūmokliniai ir hidrauliniai dozavimo siurbliai su dviguba diafragma UAB Elega, Žalgirio 131-211, Vilnius, LT 08217, Lietuva, Tel: +370 5 2 715444; tel./faksas: +370 5 2 715445; mob. tel.:
DBVS realizavimas Pagrindiniai DBVS komponentai Duomenų saugojimas diske Paruošė J.Skučas
 DBVS realizavimas Pagrindiniai DBVS komponentai Duomenų saugojimas diske Paruošė J.Skučas Seminaro tikslai Trumpai apžvelgti pagrindinius DBVS komponentus Detaliai nagrinėjami optimalaus duomenų dėstymo
DBVS realizavimas Pagrindiniai DBVS komponentai Duomenų saugojimas diske Paruošė J.Skučas Seminaro tikslai Trumpai apžvelgti pagrindinius DBVS komponentus Detaliai nagrinėjami optimalaus duomenų dėstymo
PowerPoint Presentation
 Algoritmai ir duomenų struktūros (ADS) 13 paskaita Saulius Ragaišis, VU MIF saulius.ragaisis@mif.vu.lt 2018-05-14 Šaltinis Paskaita parengta pagal William Pugh Skip Lists: A Probabilistic Alternative to
Algoritmai ir duomenų struktūros (ADS) 13 paskaita Saulius Ragaišis, VU MIF saulius.ragaisis@mif.vu.lt 2018-05-14 Šaltinis Paskaita parengta pagal William Pugh Skip Lists: A Probabilistic Alternative to
VLKK
 LIETUVIŲ KALBOS SPRENDIMŲ PLĖTRA Doc. dr. Daiva Vaišnienė Valstybinė lietuvių kalbos komisija Prioritetai Automatinio vertimo sistemų tobulinimas Šnekamosios kalbos technologijų tobulinimas Sintaksinės
LIETUVIŲ KALBOS SPRENDIMŲ PLĖTRA Doc. dr. Daiva Vaišnienė Valstybinė lietuvių kalbos komisija Prioritetai Automatinio vertimo sistemų tobulinimas Šnekamosios kalbos technologijų tobulinimas Sintaksinės
Autorinė sutartis Nr
 UAB INFORMACINIŲ TECHNOLOGIJŲ PASAULIS GENERALINIS DIREKTORIUS TOMAS LEVINSKAS SAULĖS ELEKTRINĖS ĮDIEGIMO KOMERCINIS PASIŪLYMAS 2012.08.21 Kaunas UAB Informacinių technologijų pasaulis Generalinis direktorius
UAB INFORMACINIŲ TECHNOLOGIJŲ PASAULIS GENERALINIS DIREKTORIUS TOMAS LEVINSKAS SAULĖS ELEKTRINĖS ĮDIEGIMO KOMERCINIS PASIŪLYMAS 2012.08.21 Kaunas UAB Informacinių technologijų pasaulis Generalinis direktorius
Rekomendacijos vietinės reikšmės kelių su žvyro danga taisymui
 Rekomendacijos vietinės reikšmės kelių su žvyro danga taisymui LAKD TNT skyriaus vedėjas Evaldas Petrikas Reglamentavimas Automobilių kelių standartizuotų dangų konstrukcijų projektavimo taisyklės KPT
Rekomendacijos vietinės reikšmės kelių su žvyro danga taisymui LAKD TNT skyriaus vedėjas Evaldas Petrikas Reglamentavimas Automobilių kelių standartizuotų dangų konstrukcijų projektavimo taisyklės KPT
Lietuvos mobiliojo ryšio operatorių 30Mbit/s zonų skaičiavimo metodika
 MOBILIOJO RYŠIO OPERATORIŲ 30 MB/S APRĖPTIES SKAIČIAVIMAI RRT atliktos analizės rezultatų viešas aptarimas, Susisiekimo ministerija 2015 10 19 Lietuvos respublikos ryšių reguliavimo tarnyba Direktoriaus
MOBILIOJO RYŠIO OPERATORIŲ 30 MB/S APRĖPTIES SKAIČIAVIMAI RRT atliktos analizės rezultatų viešas aptarimas, Susisiekimo ministerija 2015 10 19 Lietuvos respublikos ryšių reguliavimo tarnyba Direktoriaus
VĮ GIS-Centras Vilnius 2019 Palydovinių duomenų peržiūros ir analizės paslauga Naudotojo vadovas v.1
 VĮ GIS-Centras Vilnius 2019 Palydovinių duomenų peržiūros ir analizės paslauga Naudotojo vadovas v.1 Turinys ĮŽANGA... 3 1. PALYDOVINIŲ DUOMENŲ PERŽIŪROS IR ANALIZĖS PASLAUGA... 4 1.1. Paslaugos apžvalga...
VĮ GIS-Centras Vilnius 2019 Palydovinių duomenų peržiūros ir analizės paslauga Naudotojo vadovas v.1 Turinys ĮŽANGA... 3 1. PALYDOVINIŲ DUOMENŲ PERŽIŪROS IR ANALIZĖS PASLAUGA... 4 1.1. Paslaugos apžvalga...
Lietuvos mokslo ir studijų institucijų kompiuterių tinklas LITNET Vilniaus universitetas Mokslininko darbo vietos paslauga Paslaugos naudojimo instruk
 Lietuvos mokslo ir studijų institucijų kompiuterių tinklas LITNET Vilniaus universitetas Mokslininko darbo vietos paslauga Paslaugos naudojimo instrukcija Paslauga sukurta vykdant Europos socialinio fondo
Lietuvos mokslo ir studijų institucijų kompiuterių tinklas LITNET Vilniaus universitetas Mokslininko darbo vietos paslauga Paslaugos naudojimo instrukcija Paslauga sukurta vykdant Europos socialinio fondo
CarSense 303 M A G N E T I N Ė K I L P A N A U D O J I M O I N S T R U K C I J A
 CarSense 303 M A G N E T I N Ė K I L P A N A U D O J I M O I N S T R U K C I J A Turinys Produkto apžvalga 2 Specifikacija 3 Naudojimas 4 Nustatymai ir indikatoriai 7 Pajungimo kontaktai 8 Gedimų šalinimas
CarSense 303 M A G N E T I N Ė K I L P A N A U D O J I M O I N S T R U K C I J A Turinys Produkto apžvalga 2 Specifikacija 3 Naudojimas 4 Nustatymai ir indikatoriai 7 Pajungimo kontaktai 8 Gedimų šalinimas
Microsoft Word - 8 Laboratorinis darbas.doc
 Laboratorinis darbas Nr. 8 MOP (metalo sido puslaidininkio) struktūrų tyrimas aukštadažniu -V charakteristikų metodu Darbo tikslas: 1. Nustatyti puslaidininkio laidumo tipą. 2. Nustatyti legiravimo priemaišų
Laboratorinis darbas Nr. 8 MOP (metalo sido puslaidininkio) struktūrų tyrimas aukštadažniu -V charakteristikų metodu Darbo tikslas: 1. Nustatyti puslaidininkio laidumo tipą. 2. Nustatyti legiravimo priemaišų
CPO veiklos rezultatų ir finansinės naudos VALSTYBEI vertinimo ATASKAITA
 2010 Karolis Šerpytis CPO VEIKLOS REZULTATŲ IR FINANSINĖS NAUDOS VALSTYBEI VERTINIMO ATASKAITA Centrinė perkančioji organizacija 1 TURINYS Santrauka... 2 1. CPO veiklos rezultatų vertinimas... 3 1.1. Pirkimų
2010 Karolis Šerpytis CPO VEIKLOS REZULTATŲ IR FINANSINĖS NAUDOS VALSTYBEI VERTINIMO ATASKAITA Centrinė perkančioji organizacija 1 TURINYS Santrauka... 2 1. CPO veiklos rezultatų vertinimas... 3 1.1. Pirkimų
Techninė dokumentacija Qlik Sense architektūros apžvalga 2015 m. gruodis qlik.com
 Techninė dokumentacija Qlik Sense architektūros apžvalga 2015 m. gruodis qlik.com Platforma Qlik Sense tai analitikos platforma, naudojanti asociatyvinį analitikos variklį operatyvinėje atmintyje. Remiantis
Techninė dokumentacija Qlik Sense architektūros apžvalga 2015 m. gruodis qlik.com Platforma Qlik Sense tai analitikos platforma, naudojanti asociatyvinį analitikos variklį operatyvinėje atmintyje. Remiantis
PATVIRTINTA Mykolo Romerio universiteto Rektoriaus 2014 m. birželio 2 d. įsakymu Nr.1I-291 MYKOLO ROMERIO UNIVERSITETO LAIKINOSIOS STUDIJŲ REZULTATŲ Į
 PATVIRTINTA Mykolo Romerio universiteto Rektoriaus 2014 m. birželio 2 d. įsakymu Nr.1I-291 MYKOLO ROMERIO UNIVERSITETO LAIKINOSIOS STUDIJŲ REZULTATŲ ĮVERTINIMO PATIKROS TVARKA I. BENDROSIOS NUOSTATOS 1.
PATVIRTINTA Mykolo Romerio universiteto Rektoriaus 2014 m. birželio 2 d. įsakymu Nr.1I-291 MYKOLO ROMERIO UNIVERSITETO LAIKINOSIOS STUDIJŲ REZULTATŲ ĮVERTINIMO PATIKROS TVARKA I. BENDROSIOS NUOSTATOS 1.
K9 WebProtection (toliau K9) programa yra nemokama asmeniniam naudojimui. Programa suderinama su Windows Vista, Windows 7, Windows 10 ir Mac operacinė
 programa yra nemokama asmeniniam naudojimui. Programa suderinama su Windows Vista, Windows 7, Windows 10 ir Mac operacinė") K9 WebProtection (toliau K9) programa yra nemokama asmeniniam naudojimui. Programa suderinama su Windows Vista, Windows 7, Windows 10 ir Mac operacinėmis sistemomis. Programa K9 yra lengvai perprantama
K9 WebProtection (toliau K9) programa yra nemokama asmeniniam naudojimui. Programa suderinama su Windows Vista, Windows 7, Windows 10 ir Mac operacinėmis sistemomis. Programa K9 yra lengvai perprantama
UAB AMEA Business Solutions Praktiniai IT Sprendimai smulkioms ir vidutin ms mon ms Direktor, Jurgita Vitkauskait , K
 UAB AMEA Business Solutions Praktiniai IT Sprendimai smulkioms ir vidutin ms mon ms Direktor, Jurgita Vitkauskait j.vitkauskaite@amea.lt 2011.02.17, Kaunas +370 698 13330 Apie mus UAB AMEA Business Solutions
UAB AMEA Business Solutions Praktiniai IT Sprendimai smulkioms ir vidutin ms mon ms Direktor, Jurgita Vitkauskait j.vitkauskaite@amea.lt 2011.02.17, Kaunas +370 698 13330 Apie mus UAB AMEA Business Solutions
LIETUVOS ITS POLITIKA IR ĮGYVENDINIMAS: STATUS QUO IR ESMINIAI POKYČIAI FORMUOJANT ITS DARBOTVARKĘ GRAŽVYDAS JAKUBAUSKAS Konferencija Intelektinės tra
 LIETUVOS ITS POLITIKA IR ĮGYVENDINIMAS: STATUS QUO IR ESMINIAI POKYČIAI FORMUOJANT ITS DARBOTVARKĘ GRAŽVYDAS JAKUBAUSKAS Konferencija Intelektinės transporto sistemos ir išmaniosios technologijos transporte
LIETUVOS ITS POLITIKA IR ĮGYVENDINIMAS: STATUS QUO IR ESMINIAI POKYČIAI FORMUOJANT ITS DARBOTVARKĘ GRAŽVYDAS JAKUBAUSKAS Konferencija Intelektinės transporto sistemos ir išmaniosios technologijos transporte
Slide 1
 Dalelių filtro metodo ir vizualios odometrijos taikymas BPO lokalizacijai 2014 2018 m. studijos Doktorantas: Rokas Jurevičius Vadovas: Virginijus Marcinkevičius Disertacijos tikslas ir objektas Disertacijos
Dalelių filtro metodo ir vizualios odometrijos taikymas BPO lokalizacijai 2014 2018 m. studijos Doktorantas: Rokas Jurevičius Vadovas: Virginijus Marcinkevičius Disertacijos tikslas ir objektas Disertacijos
PS Testavimo ir konfigūravimo valdymas Užduotis nr. 1. Karolis Brazauskas Mindaugas Rekevičius Jonas Riliškis Eugenijus Sabaliauskas
 PS Testavimo ir konfigūravimo valdymas Užduotis nr. 1. Karolis Brazauskas Mindaugas Rekevičius Jonas Riliškis Eugenijus Sabaliauskas 2014-10-01 IT Kompanija Dirbame pagal užsakymus, daugiausiai 2 projektai
PS Testavimo ir konfigūravimo valdymas Užduotis nr. 1. Karolis Brazauskas Mindaugas Rekevičius Jonas Riliškis Eugenijus Sabaliauskas 2014-10-01 IT Kompanija Dirbame pagal užsakymus, daugiausiai 2 projektai
CIVILINĖS AVIACIJOS ADMINISTRACIJOS DIREKTORIUS Į S A K Y M A S DĖL MĖGĖJIŠKOS KONSTRUKCIJOS ORLAIVIŲ GAMYBOS, JŲ TINKAMUMO SKRAIDYTI NUSTATYMO IR NAU
 CIVILINĖS AVIACIJOS ADMINISTRACIJOS DIREKTORIUS Į S A K Y M A S DĖL MĖGĖJIŠKOS KONSTRUKCIJOS ORLAIVIŲ GAMYBOS, JŲ TINKAMUMO SKRAIDYTI NUSTATYMO IR NAUDOJIMO TAISYKLIŲ 2001 m. gruodžio 27 d. Nr. 109 Vilnius
CIVILINĖS AVIACIJOS ADMINISTRACIJOS DIREKTORIUS Į S A K Y M A S DĖL MĖGĖJIŠKOS KONSTRUKCIJOS ORLAIVIŲ GAMYBOS, JŲ TINKAMUMO SKRAIDYTI NUSTATYMO IR NAUDOJIMO TAISYKLIŲ 2001 m. gruodžio 27 d. Nr. 109 Vilnius
PATVIRTINTA Valstybinės kainų ir energetikos kontrolės komisijos pirmininko 2017 m. d. įsakymu Nr. O1- VALSTYBINĖS KAINŲ IR ENERGETIKOS KONTROLĖS KOMI
 PATVIRTINTA Valstybinės kainų ir energetikos kontrolės komisijos pirmininko 2017 m. d. įsakymu Nr. O1- VALSTYBINĖS KAINŲ IR ENERGETIKOS KONTROLĖS KOMISIJOS ELEKTROS ENERGIJOS KAINŲ PALYGINIMO INFORMACINĖS
PATVIRTINTA Valstybinės kainų ir energetikos kontrolės komisijos pirmininko 2017 m. d. įsakymu Nr. O1- VALSTYBINĖS KAINŲ IR ENERGETIKOS KONTROLĖS KOMISIJOS ELEKTROS ENERGIJOS KAINŲ PALYGINIMO INFORMACINĖS
TRUMPA AIRTIES AIR4920 DIEGIMO INSTRUKCIJA
 TRUMPA AIRTIES AIR4920 DIEGIMO INSTRUKCIJA www.telia.lt PASKIRTIS IR NAUDOJIMAS Įrenginiai AirTies Air4920 skirti naudoti tiek po vieną (1), tiek tarpusavyje sujungus kelis (2). Tarpusavyje sujungti įrenginius
TRUMPA AIRTIES AIR4920 DIEGIMO INSTRUKCIJA www.telia.lt PASKIRTIS IR NAUDOJIMAS Įrenginiai AirTies Air4920 skirti naudoti tiek po vieną (1), tiek tarpusavyje sujungus kelis (2). Tarpusavyje sujungti įrenginius
NACIONALINIS KIBERNETINIO SAUGUMO CENTRAS Tel El. p. NACIONALINIS KIBERNETINIO SAUGUMO CENTRAS PRIE KRA
 PRIE KRAŠTO APSAUGOS MINISTERIJOS RESPUBLIKOS PREZIDENTO IR EUROPOS PARLAMENTO RINKIMŲ KIBERNETINĖS ERDVĖS STEBĖSENOS ATASKAITA 2019 m. gegužės 28 d. Vilnius Santrauka: Respublikos Prezidento ir Europos
PRIE KRAŠTO APSAUGOS MINISTERIJOS RESPUBLIKOS PREZIDENTO IR EUROPOS PARLAMENTO RINKIMŲ KIBERNETINĖS ERDVĖS STEBĖSENOS ATASKAITA 2019 m. gegužės 28 d. Vilnius Santrauka: Respublikos Prezidento ir Europos
AB FREDA
 PATVIRTINTA Kauno technologijos universiteto inžinerijos licėjaus direktoriaus 2018 m. rugpjūčio 31 d. įsakymu Nr. V-173 KAUNO TECHNOLOGIJOS UNIVERSITETO INŽINERIJOS LICĖJAUS VAIZDO DUOMENŲ TVARKYMO TAISYKLĖS
PATVIRTINTA Kauno technologijos universiteto inžinerijos licėjaus direktoriaus 2018 m. rugpjūčio 31 d. įsakymu Nr. V-173 KAUNO TECHNOLOGIJOS UNIVERSITETO INŽINERIJOS LICĖJAUS VAIZDO DUOMENŲ TVARKYMO TAISYKLĖS
Honda GL1800 GOLD WING TOUR Gold Wing Tour Pasirodžius naujausiai legendinio Honda Gold Wing motociklo versijai šis neprilygstamas turistinis motocikl
 Honda GL1800 GOLD WING TOUR Gold Wing Tour Pasirodžius naujausiai legendinio Honda Gold Wing motociklo versijai šis neprilygstamas turistinis motociklas tapo dar universalesnis. Galima sakyti, kad šis
Honda GL1800 GOLD WING TOUR Gold Wing Tour Pasirodžius naujausiai legendinio Honda Gold Wing motociklo versijai šis neprilygstamas turistinis motociklas tapo dar universalesnis. Galima sakyti, kad šis
LIETUVOS ŽEMĖS ŪKIO UNIVERSITETAS
 STUDIJŲ DALYKO APRAŠAS Dalyko kodas: IFEB B029 Pavadinimas lietuvių kalba: Atsinaujinančiosios energetikos sistemos. Pavadinimas anglų kalba: Renewable energy systems. Dalyko apimtis: 6 kreditai, 160 valandos,
STUDIJŲ DALYKO APRAŠAS Dalyko kodas: IFEB B029 Pavadinimas lietuvių kalba: Atsinaujinančiosios energetikos sistemos. Pavadinimas anglų kalba: Renewable energy systems. Dalyko apimtis: 6 kreditai, 160 valandos,
Microsoft Word - B AM MSWORD
 25.11.2014 B8-0286/7 7 1 dalis 1. ragina valstybes nares ir Komisiją d ti tvarias pastangas įgyvendinti esamas taisykles ir užtikrinti, kad jų būtų laikomasi kaip visa apimančios strategijos dalį naikinti
25.11.2014 B8-0286/7 7 1 dalis 1. ragina valstybes nares ir Komisiją d ti tvarias pastangas įgyvendinti esamas taisykles ir užtikrinti, kad jų būtų laikomasi kaip visa apimančios strategijos dalį naikinti
PATVIRTINTA Kauno sporto mokyklos Startas Direktoriaus 2019 m. balandžio 23 d. įsakymu Nr KAUNO SPORTO MOKYKLOS STARTAS PRIVATUMO POLITIKA Kauno
 PATVIRTINTA Kauno sporto mokyklos Startas Direktoriaus 2019 m. balandžio 23 d. įsakymu Nr. 1-28 KAUNO SPORTO MOKYKLOS STARTAS PRIVATUMO POLITIKA Kauno sporto mokykla Startas (toliau - Mokykla) vertina
PATVIRTINTA Kauno sporto mokyklos Startas Direktoriaus 2019 m. balandžio 23 d. įsakymu Nr. 1-28 KAUNO SPORTO MOKYKLOS STARTAS PRIVATUMO POLITIKA Kauno sporto mokykla Startas (toliau - Mokykla) vertina
PowerPoint Presentation
 Duomenų archyvai ir mokslo duomenų valdymo planai 2018-06-13 1 Re3Data duomenų talpyklų registras virš 2000 mokslinių tyrimų duomenų talpyklų; talpyklos paiešką galima atlikti pagal mokslo kryptį, šalį,
Duomenų archyvai ir mokslo duomenų valdymo planai 2018-06-13 1 Re3Data duomenų talpyklų registras virš 2000 mokslinių tyrimų duomenų talpyklų; talpyklos paiešką galima atlikti pagal mokslo kryptį, šalį,
Java esminės klasės, 1 dalis Išimtys, Įvestis/išvestis
 Java esminės klasės, 1 dalis Išimtys, Įvestis/išvestis Klaidų apdorojimas C kalboje If (kazkokia_salyga) { klaidos_apdorojimas(); return... } Tokio kodo apimtis galėdavo sekti iki 70-80proc. Klaidų/išimčių
Java esminės klasės, 1 dalis Išimtys, Įvestis/išvestis Klaidų apdorojimas C kalboje If (kazkokia_salyga) { klaidos_apdorojimas(); return... } Tokio kodo apimtis galėdavo sekti iki 70-80proc. Klaidų/išimčių
NACIONALINIS KIBERNETINIO SAUGUMO CENTRAS Tel El. p. NACIONALINIS KIBERNETINIO SAUGUMO CENTRAS PRIE KRAŠTO APSA
 PRIE KRAŠTO APSAUGOS MINISTERIJOS SUTRUMPINTAS PRANEŠIMAS APIE KIBERNETINIO INCIDENTO TYRIMĄ NR. 163811 2019 m. balandžio 19 d. Vilnius TLP: WHITE Kibernetinio incidento tyrimo objektas: 2019-04-10 imituotų
PRIE KRAŠTO APSAUGOS MINISTERIJOS SUTRUMPINTAS PRANEŠIMAS APIE KIBERNETINIO INCIDENTO TYRIMĄ NR. 163811 2019 m. balandžio 19 d. Vilnius TLP: WHITE Kibernetinio incidento tyrimo objektas: 2019-04-10 imituotų
PowerPoint Presentation
 Autorių teisės ir plagiato prevencija Jūratė Kuliešienė Daiva Steponavičienė KTU biblioteka Turinys Intelektinė nuosavybė Autorių teisės Plagiato prevencija Intelektinė nuosavybė (IN) Intelektinė nuosavybė
Autorių teisės ir plagiato prevencija Jūratė Kuliešienė Daiva Steponavičienė KTU biblioteka Turinys Intelektinė nuosavybė Autorių teisės Plagiato prevencija Intelektinė nuosavybė (IN) Intelektinė nuosavybė
UAB VALENTIS PRIVATUMO POLITIKA Uždaroji akcinė bendrovė Valentis (toliau Valentis arba mes), įgyvendindama 2016 m. balandžio 27 d. Europos Parlamento
, įgyvendindama 2016 m. balandžio 27 d. Europos Parlamento") UAB VALENTIS PRIVATUMO POLITIKA Uždaroji akcinė bendrovė Valentis (toliau Valentis arba mes), įgyvendindama 2016 m. balandžio 27 d. Europos Parlamento ir Tarybos reglamento (ES) 2016/679 dėl fizinių asmenų
UAB VALENTIS PRIVATUMO POLITIKA Uždaroji akcinė bendrovė Valentis (toliau Valentis arba mes), įgyvendindama 2016 m. balandžio 27 d. Europos Parlamento ir Tarybos reglamento (ES) 2016/679 dėl fizinių asmenų
Funkcionalumo išsaugojimas, statybinė
 Funkcionalumo išsaugojimas, statybinė medžiaga mediena Kabelių sistemos pagal DIN 4102 12 dalį Building Connections funkcionalumo išsaugojimas Statybinė medžiaga mediena Kilus gaisrui daugelyje pastatų,
Funkcionalumo išsaugojimas, statybinė medžiaga mediena Kabelių sistemos pagal DIN 4102 12 dalį Building Connections funkcionalumo išsaugojimas Statybinė medžiaga mediena Kilus gaisrui daugelyje pastatų,
PowerPoint Presentation
 Algoritmai ir duomenų struktūros (ADS) 15 paskaita Saulius Ragaišis, VU MIF saulius.ragaisis@mif.vu.lt 2018-05-28 Grįžtamasis ryšys Ačiū visiems dalyvavusiems Daug pagyrimų Ačiū, bet jie nepadeda tobulėti.
Algoritmai ir duomenų struktūros (ADS) 15 paskaita Saulius Ragaišis, VU MIF saulius.ragaisis@mif.vu.lt 2018-05-28 Grįžtamasis ryšys Ačiū visiems dalyvavusiems Daug pagyrimų Ačiū, bet jie nepadeda tobulėti.
Pardavimų aplikacija (Microsoft Dynamics AX (Axapta) sistemai) Diegimo instrukcija bifree.lt qlik.com
 sistemai) Diegimo instrukcija bifree.lt qlik.com") Pardavimų aplikacija (Microsoft Dynamics AX (Axapta) sistemai) Diegimo instrukcija bifree.lt qlik.com Microsoft Dynamics AX (Axapta) sistemai 2 Kaip įsidiegti Diegimo žingsniai: 1. Atsisiųsti ir įsidiegti
Pardavimų aplikacija (Microsoft Dynamics AX (Axapta) sistemai) Diegimo instrukcija bifree.lt qlik.com Microsoft Dynamics AX (Axapta) sistemai 2 Kaip įsidiegti Diegimo žingsniai: 1. Atsisiųsti ir įsidiegti
Microsoft Word - SDH2.doc
 PATVIRTINTA AB Lietuvos geleţinkeliai Geleţinkelių infrastruktūros direkcijos direktoriaus 2009-11-30 įsakymu Nr. Į (DI-161) SDH SĄSAJOS TECHNINIS APRAŠAS TURINYS I. BENDROJI DALIS... 4 II. TAIKYMO SRITIS...
PATVIRTINTA AB Lietuvos geleţinkeliai Geleţinkelių infrastruktūros direkcijos direktoriaus 2009-11-30 įsakymu Nr. Į (DI-161) SDH SĄSAJOS TECHNINIS APRAŠAS TURINYS I. BENDROJI DALIS... 4 II. TAIKYMO SRITIS...
* # * # # 1 TIESĖS IR PLOKŠTUMOS 1 1 Tiesės ir plokštumos 1.1 Lygtys ir taškų aibės Sferos lygtis Tarkime, kad erdvėje apibrėžta Dekarto stačiak
 1 TIESĖS IR PLOKŠTUMOS 1 1 Tiesės ir plokštumos 1.1 Lygtys ir taškų aibės 1.1.1 Sferos lygtis Tarkime kad erdvėje apibrėžta Dekarto stačiakampė koordinačių sistema Sfera su centru taške ir spinduliu yra
1 TIESĖS IR PLOKŠTUMOS 1 1 Tiesės ir plokštumos 1.1 Lygtys ir taškų aibės 1.1.1 Sferos lygtis Tarkime kad erdvėje apibrėžta Dekarto stačiakampė koordinačių sistema Sfera su centru taške ir spinduliu yra
PATVIRTINTA Elektrėnų pradinės mokyklos direktoriaus 2011 m. rugpjūčio 22 d. įsakymu Nr. 1V 69 ELEKTRĖNŲ PRADINĖS MOKYKLOS MOKINIŲ PAŽANGOS IR PASIEKI
 PATVIRTINTA direktoriaus 2011 m. rugpjūčio 22 d. įsakymu Nr. 1V 69 ELEKTRĖNŲ PRADINĖS MOKYKLOS MOKINIŲ PAŽANGOS IR PASIEKIMŲ VERTINIMO TVARKA I. BENDROSIOS NUOSTATOS 1. (toliau mokyklos) mokinių pažangos
PATVIRTINTA direktoriaus 2011 m. rugpjūčio 22 d. įsakymu Nr. 1V 69 ELEKTRĖNŲ PRADINĖS MOKYKLOS MOKINIŲ PAŽANGOS IR PASIEKIMŲ VERTINIMO TVARKA I. BENDROSIOS NUOSTATOS 1. (toliau mokyklos) mokinių pažangos
Longse Wi-Fi kameros greito paleidimo instrukcija 1. Jums prireiks 1.1. Longse Wi-Fi kameros 1.2. Vaizdo stebėjimo kameros maitinimo šaltinio 1.3. UTP
 Longse Wi-Fi kameros greito paleidimo instrukcija 1. Jums prireiks 1.1. Longse Wi-Fi kameros 1.2. Vaizdo stebėjimo kameros maitinimo šaltinio 1.3. UTP RJ-45 interneto kabelio 1.4. Kompiuterio su prieiga
Longse Wi-Fi kameros greito paleidimo instrukcija 1. Jums prireiks 1.1. Longse Wi-Fi kameros 1.2. Vaizdo stebėjimo kameros maitinimo šaltinio 1.3. UTP RJ-45 interneto kabelio 1.4. Kompiuterio su prieiga
INW orpūtės ir oro siurbliai su šoniniu kanalu _ 1.1_Vienos pakopos 1.2_Dviejų pakopų 1.3_Aukšto slėgio Air and Vacuum Components
 INW orpūtės ir oro siurbliai su šoniniu kanalu _ 1.1_Vienos pakopos 1.2_Dviejų pakopų 1._Aukšto slėgio Air and Vacuum Components 1 INW orpūtės ir oro siurbliai su šoniniu kanalu _ Orpūtės / oro siurbliai
INW orpūtės ir oro siurbliai su šoniniu kanalu _ 1.1_Vienos pakopos 1.2_Dviejų pakopų 1._Aukšto slėgio Air and Vacuum Components 1 INW orpūtės ir oro siurbliai su šoniniu kanalu _ Orpūtės / oro siurbliai
RET2000 Elektronisis Skaitmeninis Termostatas su LCD
 MAKING MODERN LIVING POSSIBLE RET2000 B/M/MS Elektroninis skaitmeninis termostatas su LCD Danfoss Heating Montavimo vadovas Norėdami gauti išsamią spausdintą šių instrukcijų versiją, skambinkite Rinkodaros
MAKING MODERN LIVING POSSIBLE RET2000 B/M/MS Elektroninis skaitmeninis termostatas su LCD Danfoss Heating Montavimo vadovas Norėdami gauti išsamią spausdintą šių instrukcijų versiją, skambinkite Rinkodaros
PowerPoint Presentation
 Valstybinės energetikos inspekcijos vartotojams teikiamų paslaugų kokybės, prieinamumo ir pasitenkinimo tyrimas užsakovas vykdytojas Kovas, 2016 metodologija 2 Tyrimo metodologija Visuomenės nuomonės ir
Valstybinės energetikos inspekcijos vartotojams teikiamų paslaugų kokybės, prieinamumo ir pasitenkinimo tyrimas užsakovas vykdytojas Kovas, 2016 metodologija 2 Tyrimo metodologija Visuomenės nuomonės ir
priedai ir pasirenkami prietaisai medienos smulkintuvams designed manufac tur ed denmar k Reliable Chipping
 priedai ir pasirenkami prietaisai medienos smulkintuvams designed manufac tur ed denmar k Reliable Chipping pritaikykite savo tp medienos smulkintuvą tam darbui, kurį ketinate atlikti Linddana skiria labai
priedai ir pasirenkami prietaisai medienos smulkintuvams designed manufac tur ed denmar k Reliable Chipping pritaikykite savo tp medienos smulkintuvą tam darbui, kurį ketinate atlikti Linddana skiria labai
A. Merkys ASOCIACIJA LANGAS Į ATEITĮ, 2015 m. Elektroninis mokymasis Tikriausiai šiais laikais daugelis esate girdėję apie elektroninį bei nuotolinį m
 A. Merkys ASOCIACIJA LANGAS Į ATEITĮ, 2015 m. Elektroninis mokymasis Tikriausiai šiais laikais daugelis esate girdėję apie elektroninį bei nuotolinį mokymą(si) ar net jį išbandę. Jis taikomas ne tik išsivysčiusiose
A. Merkys ASOCIACIJA LANGAS Į ATEITĮ, 2015 m. Elektroninis mokymasis Tikriausiai šiais laikais daugelis esate girdėję apie elektroninį bei nuotolinį mokymą(si) ar net jį išbandę. Jis taikomas ne tik išsivysčiusiose
PowerPoint Presentation
 Sisteminės kontrolės priemonės moderniam šilumos tiekimui Vytautas Deksnys KTU multisensorinių sistemų laboratorija Tel. 8698 48828, 0037037 300541 Vytautas.Deksnys@ktu.lt Paskirtis Priemonės yra skirtos
Sisteminės kontrolės priemonės moderniam šilumos tiekimui Vytautas Deksnys KTU multisensorinių sistemų laboratorija Tel. 8698 48828, 0037037 300541 Vytautas.Deksnys@ktu.lt Paskirtis Priemonės yra skirtos
Ekonomikos inžinerijos studijų programos (valstybinis kodas: 612L10009) specializacijų aprašai Specializacija E-verslo ekonomika Specializaciją kuruoj
 specializacijų aprašai Specializacija E-verslo ekonomika Specializaciją kuruoj") Ekonomikos inžinerijos studijų programos (valstybinis kodas: 612L10009) specializacijų aprašai Specializacija E-verslo ekonomika Specializaciją kuruoja Verslo technologijų katedra, Tel.: 8 (5) 2744882,
Ekonomikos inžinerijos studijų programos (valstybinis kodas: 612L10009) specializacijų aprašai Specializacija E-verslo ekonomika Specializaciją kuruoja Verslo technologijų katedra, Tel.: 8 (5) 2744882,
PowerPoint Presentation
 Skaitmeninės kabelinės televizijos galimybės Mindaugas Žilinskas Ryšių reguliavimo tarnybos Radijo ryšio departamento direktorius Vilnius, 2012 m. 1 Turinys 1. Raiškiosios (HD) televizijos standartai ir
Skaitmeninės kabelinės televizijos galimybės Mindaugas Žilinskas Ryšių reguliavimo tarnybos Radijo ryšio departamento direktorius Vilnius, 2012 m. 1 Turinys 1. Raiškiosios (HD) televizijos standartai ir
Banko_paslaugu_internetu_teikimo_salygos_
 Banko paslaugų internetu teikimo sąlygos 1. Banko paslaugos internetu tai AB SEB banko (toliau Bankas) ir SEB grupės įmonių, kurioms atstovauja Bankas ar kurios naudojasi Banko paslaugų internetu sistema,
Banko paslaugų internetu teikimo sąlygos 1. Banko paslaugos internetu tai AB SEB banko (toliau Bankas) ir SEB grupės įmonių, kurioms atstovauja Bankas ar kurios naudojasi Banko paslaugų internetu sistema,
Atviro konkurso sąlygų 4 priedas BENDROJO PAGALBOS CENTRO INFORMACINĖS SISTEMOS APTARNAVIMO PASLAUGŲ TEIKIMO SPECIFIKACIJA 1. Pirkimo objektas Bendroj
 Atviro konkurso sąlygų 4 priedas BENDROJO PAGALBOS CENTRO INFORMACINĖS SISTEMOS APTARNAVIMO PASLAUGŲ TEIKIMO SPECIFIKACIJA 1. Pirkimo objektas Bendrojo pagalbos centro informacinės sistemos BPCIS, esančios
Atviro konkurso sąlygų 4 priedas BENDROJO PAGALBOS CENTRO INFORMACINĖS SISTEMOS APTARNAVIMO PASLAUGŲ TEIKIMO SPECIFIKACIJA 1. Pirkimo objektas Bendrojo pagalbos centro informacinės sistemos BPCIS, esančios
BALSO SKAMBUČIŲ UŽBAIGIMO JUDRIOJO RYŠIO TINKLE SĄNAUDŲ APSKAIČIAVIMO PAAIŠKINIMAS IR SKAMBUČIŲ INICIJAVIMO SĄNAUDŲ SKAIČIAVIMO PRINCIPŲ PAAIŠKINIMAS
 BALSO SKAMBUČIŲ UŽBAIGIMO JUDRIOJO RYŠIO TINKLE SĄNAUDŲ APSKAIČIAVIMO PAAIŠKINIMAS IR SKAMBUČIŲ INICIJAVIMO SĄNAUDŲ SKAIČIAVIMO PRINCIPŲ PAAIŠKINIMAS I. ĮŽANGA Lietuvos Respublikos ryšių reguliavimo tarnybos
BALSO SKAMBUČIŲ UŽBAIGIMO JUDRIOJO RYŠIO TINKLE SĄNAUDŲ APSKAIČIAVIMO PAAIŠKINIMAS IR SKAMBUČIŲ INICIJAVIMO SĄNAUDŲ SKAIČIAVIMO PRINCIPŲ PAAIŠKINIMAS I. ĮŽANGA Lietuvos Respublikos ryšių reguliavimo tarnybos
Microsoft Word - 15_paskaita.doc
 15 PASKAITA Turinys: Išimtys Išimtys (exceptions) programos vykdymo metu kylančios klaidingos situacijos, nutraukiančios programos darbą (pavyzdžiui, dalyba iš nulio, klaida atveriant duomenų failą, indekso
15 PASKAITA Turinys: Išimtys Išimtys (exceptions) programos vykdymo metu kylančios klaidingos situacijos, nutraukiančios programos darbą (pavyzdžiui, dalyba iš nulio, klaida atveriant duomenų failą, indekso
PowerPoint Presentation
 Procesų skaitmenizavimas gamybinėje įmonėje. MANTINGOS patirtis DUONOS, UŽKANDŽIŲ IR ŠALDYTŲ GAMINIŲ KOMPANIJA INFOBALT 2019.03.20 PRANEŠĖJAS Audrius Grybauskas, UAB Columbus Lietuva konsultantas Mob.:
Procesų skaitmenizavimas gamybinėje įmonėje. MANTINGOS patirtis DUONOS, UŽKANDŽIŲ IR ŠALDYTŲ GAMINIŲ KOMPANIJA INFOBALT 2019.03.20 PRANEŠĖJAS Audrius Grybauskas, UAB Columbus Lietuva konsultantas Mob.:
PRIEDAI 199 G priedas. Skirtingų kartų elektroninių vartotojų portretai G.1 lentelė. Kūkikių bumo kartos elektroninio vartotojo portretas (sudaryta au
 PRIEDAI 199 G priedas. Skirtingų kartų elektroninių vartotojų portretai G.1 lentelė. Kūkikių bumo kartos elektroninio vartotojo portretas (sudaryta autorės) Table G.1. Electronic customer profile of baby
PRIEDAI 199 G priedas. Skirtingų kartų elektroninių vartotojų portretai G.1 lentelė. Kūkikių bumo kartos elektroninio vartotojo portretas (sudaryta autorės) Table G.1. Electronic customer profile of baby
Rodiklio pavadinimas Data
 LIETUVOS RESPUBLIKOS RYŠIŲ REGULIAVIMO TARNYBA STRATEGIJOS DEPARTAMENTAS EKONOMINĖS ANALIZĖS SKYRIUS ATASKAITA APIE ELEKTRONINIŲ RYŠIŲ TINKLŲ IR PASLAUGŲ TEIKĖJŲ 2016 M. IV KETVIRTĮ VYKDYTĄ ELEKTRONINIŲ
LIETUVOS RESPUBLIKOS RYŠIŲ REGULIAVIMO TARNYBA STRATEGIJOS DEPARTAMENTAS EKONOMINĖS ANALIZĖS SKYRIUS ATASKAITA APIE ELEKTRONINIŲ RYŠIŲ TINKLŲ IR PASLAUGŲ TEIKĖJŲ 2016 M. IV KETVIRTĮ VYKDYTĄ ELEKTRONINIŲ
VABALNINKO BALIO SRUOGOS GIMNAZIJA Vabalninko Balio Sruogos gimnazija K.Šakenio g. 12, Vabalninkas, Biržų raj. Tel. (8-450)
") VABALNINKO BALIO SRUOGOS GIMNAZIJA Vabalninko Balio Sruogos gimnazija K.Šakenio g. 12, Vabalninkas, Biržų raj. Tel. (8-450) 54275 El.p.rastine@vabalninko.birzai.lm.lt. GIMNAZIJOS VEIKLOS KOKYBĖS ĮSIVERTINIMO
VABALNINKO BALIO SRUOGOS GIMNAZIJA Vabalninko Balio Sruogos gimnazija K.Šakenio g. 12, Vabalninkas, Biržų raj. Tel. (8-450) 54275 El.p.rastine@vabalninko.birzai.lm.lt. GIMNAZIJOS VEIKLOS KOKYBĖS ĮSIVERTINIMO
PowerPoint Presentation
 PAKVIESTŲJŲ STUDIJUOTI KTK IR KITOSE LIETUVOS KOLEGIJOSE 1 PRIEDAS PAGAL PAGEIDAVIMO NUMERĮ REZULTATŲ DINAMIKA 2014 M., 2015 M., 2016 M. Atkreiptinas dėmesys į pakviestųjų pagal pageidavimo numerį rezultatą:
PAKVIESTŲJŲ STUDIJUOTI KTK IR KITOSE LIETUVOS KOLEGIJOSE 1 PRIEDAS PAGAL PAGEIDAVIMO NUMERĮ REZULTATŲ DINAMIKA 2014 M., 2015 M., 2016 M. Atkreiptinas dėmesys į pakviestųjų pagal pageidavimo numerį rezultatą:
AB FREDA
 PATVIRTINTA Kauno Simono Daukanto progimnazijos direktoriaus 2018 m. rugpjūčio 20 d. įsakymu Nr. KAUNO SIMONO DAUKANTO PROGIMNAZIJOS VAIZDO DUOMENŲ TVARKYMO TAISYKLĖS I. BENDROSIOS NUOSTATOS 1. Kauno Simono
PATVIRTINTA Kauno Simono Daukanto progimnazijos direktoriaus 2018 m. rugpjūčio 20 d. įsakymu Nr. KAUNO SIMONO DAUKANTO PROGIMNAZIJOS VAIZDO DUOMENŲ TVARKYMO TAISYKLĖS I. BENDROSIOS NUOSTATOS 1. Kauno Simono
Slide 1
 Duomenų struktūros ir algoritmai 2 paskaita 2019-02-13 Algoritmo sąvoka Algoritmas tai tam tikra veiksmų seka, kurią reikia atlikti norint gauti rezultatą. Įvesties duomenys ALGORITMAS Išvesties duomenys
Duomenų struktūros ir algoritmai 2 paskaita 2019-02-13 Algoritmo sąvoka Algoritmas tai tam tikra veiksmų seka, kurią reikia atlikti norint gauti rezultatą. Įvesties duomenys ALGORITMAS Išvesties duomenys
Socialiniai tinklai ir bendrinimas Dalyviai turės progą pagalvoti apie privatumą, kai internete bendrina informaciją ir bendrauja su kitais, o ypač, k
 Socialiniai tinklai ir bendrinimas Dalyviai turės progą pagalvoti apie privatumą, kai internete bendrina informaciją ir bendrauja su kitais, o ypač, kai naudojasi socialiniais tinklais. Dalyviai gebės
Socialiniai tinklai ir bendrinimas Dalyviai turės progą pagalvoti apie privatumą, kai internete bendrina informaciją ir bendrauja su kitais, o ypač, kai naudojasi socialiniais tinklais. Dalyviai gebės
Microsoft Word - DV_Rekomendacijos2
 DOKUMENTŲ VALDYMO FUNKCIJOS EFEKTYVAUS ATLIKIMO REKOMENDACIJOS I. BENDROSIOS NUOSTATOS Dokumentų valdymo funkcijos efektyvaus atlikimo rekomendacijų (toliau Rekomendacijos) tikslas nustatyti valstybės
DOKUMENTŲ VALDYMO FUNKCIJOS EFEKTYVAUS ATLIKIMO REKOMENDACIJOS I. BENDROSIOS NUOSTATOS Dokumentų valdymo funkcijos efektyvaus atlikimo rekomendacijų (toliau Rekomendacijos) tikslas nustatyti valstybės
Transformatorių pastočių (skirstomųjų punktų) 10 kV linijiniai narveliai
 10 kV linijiniai narveliai") Eil. Nr. PATVIRTINTA AB LESTO 2011 m. rugpjūčio 26 d. Elektros tinklo tarnybos direktoriaus-generalinio direktoriaus pavaduotojo nurodymu Nr. 365 TRANSFORMATORIŲ PASTOČIŲ (SKIRSTOMŲJŲ PUNKTŲ) 10 kv SEMI
Eil. Nr. PATVIRTINTA AB LESTO 2011 m. rugpjūčio 26 d. Elektros tinklo tarnybos direktoriaus-generalinio direktoriaus pavaduotojo nurodymu Nr. 365 TRANSFORMATORIŲ PASTOČIŲ (SKIRSTOMŲJŲ PUNKTŲ) 10 kv SEMI
PATVIRTINTA Lietuvos banko valdybos 2015 m. sausio 29 d. nutarimu Nr (Lietuvos banko valdybos 2018 m. spalio 30 d. nutarimo Nr redakcij
 PATVIRTINTA Lietuvos banko valdybos 2015 m. sausio 29 d. nutarimu Nr. 03-10 (Lietuvos banko valdybos 2018 m. spalio 30 d. nutarimo Nr. 03-202 redakcija) PRIĖMIMO Į TARNYBĄ LIETUVOS BANKE TVARKOS APRAŠAS
PATVIRTINTA Lietuvos banko valdybos 2015 m. sausio 29 d. nutarimu Nr. 03-10 (Lietuvos banko valdybos 2018 m. spalio 30 d. nutarimo Nr. 03-202 redakcija) PRIĖMIMO Į TARNYBĄ LIETUVOS BANKE TVARKOS APRAŠAS
Programų sistemų inžinerija Saulius Ragaišis, VU MIF
 Programų sistemų inžinerija 2014-02-12 Saulius Ragaišis, VU MIF saulius.ragaisis@mif.vu.lt SWEBOK evoliucija Nuo SWEBOK Guide to the Software Engineering Body of Knowledge, 2004 Version. IEEE, 2004. prie
Programų sistemų inžinerija 2014-02-12 Saulius Ragaišis, VU MIF saulius.ragaisis@mif.vu.lt SWEBOK evoliucija Nuo SWEBOK Guide to the Software Engineering Body of Knowledge, 2004 Version. IEEE, 2004. prie
VIEŠO NAUDOJIMO Aplinkos oro teršalų koncentracijos tyrimų, atliktų 2017 m. rugpjūčio d. Šiltnamių g. 23 Vilniaus mieste, naudojant mobiliąją la
 Aplinkos oro teršalų koncentracijos tyrimų, atliktų 2017 m. rugpjūčio 11 25 d. Šiltnamių g. 23 Vilniaus mieste, naudojant mobiliąją laboratoriją, rezultatų apžvalga Vilnius, 2017 m. Turinys Įžanga... 3
Aplinkos oro teršalų koncentracijos tyrimų, atliktų 2017 m. rugpjūčio 11 25 d. Šiltnamių g. 23 Vilniaus mieste, naudojant mobiliąją laboratoriją, rezultatų apžvalga Vilnius, 2017 m. Turinys Įžanga... 3
BASEINO OCTO+ 460, 540, 640 IR 840 MODELIO, AIKŠTELĖS PARUOŠIMAS IR MEDINIO KARKASO SURINKIMAS + LENTJUOSTES MONTAVIMAS + PATIESALO MONTAVIMAS Atlikit
 BASEINO OCTO+ 460, 540, 640 IR 840 MODELIO, AIKŠTELĖS PARUOŠIMAS IR MEDINIO KARKASO SURINKIMAS + LENTJUOSTES MONTAVIMAS + PATIESALO MONTAVIMAS Atlikite aikštelės nuţymėjimą po baseinu, pašalinkite augalus,
BASEINO OCTO+ 460, 540, 640 IR 840 MODELIO, AIKŠTELĖS PARUOŠIMAS IR MEDINIO KARKASO SURINKIMAS + LENTJUOSTES MONTAVIMAS + PATIESALO MONTAVIMAS Atlikite aikštelės nuţymėjimą po baseinu, pašalinkite augalus,
Priedas
 Vilniaus Gedimino technikos universitetas skelbia konkursą išvardintose katedrose ir mokslo padaliniuose užimti šias pareigas: I. GAMTOS IR TECHNOLOGIJOS MOKSLŲ SRITYSE APLINKOS INŽINERIJOS FAKULTETE 1.
Vilniaus Gedimino technikos universitetas skelbia konkursą išvardintose katedrose ir mokslo padaliniuose užimti šias pareigas: I. GAMTOS IR TECHNOLOGIJOS MOKSLŲ SRITYSE APLINKOS INŽINERIJOS FAKULTETE 1.
Viešoji konsultacija dėl dezinformacijos apie Lietuvą sklaidos mažinimo užsienyje 2019 m. kovo mėn., Vilnius KONTEKSTAS KONSULTACIJOS TIKSLAS VIEŠOSIO
 Viešoji konsultacija dėl dezinformacijos apie Lietuvą sklaidos mažinimo užsienyje 2019 m. kovo mėn., Vilnius KONTEKSTAS TIKSLAS VIEŠOSIOS POLITIKOS PRIORITETAS Lietuvai priešiškos šalys jau ilgą laiką
Viešoji konsultacija dėl dezinformacijos apie Lietuvą sklaidos mažinimo užsienyje 2019 m. kovo mėn., Vilnius KONTEKSTAS TIKSLAS VIEŠOSIOS POLITIKOS PRIORITETAS Lietuvai priešiškos šalys jau ilgą laiką
PowerPoint Presentation
 KAIP FORMUOJAMASIS VERTINIMAS PADEDA SIEKTI INDIVIDUALIOS PAŽANGOS: REFLEKSIJA KOKYBĖS SIEKIANČIŲ MOKYKLŲ KLUBO KONFERENCIJA MOKINIŲ UGDYMO(SI) PASIEKIMAI. SAMPRATA IR SKATINIMO GALIMYBĖS Doc. dr. Viktorija
KAIP FORMUOJAMASIS VERTINIMAS PADEDA SIEKTI INDIVIDUALIOS PAŽANGOS: REFLEKSIJA KOKYBĖS SIEKIANČIŲ MOKYKLŲ KLUBO KONFERENCIJA MOKINIŲ UGDYMO(SI) PASIEKIMAI. SAMPRATA IR SKATINIMO GALIMYBĖS Doc. dr. Viktorija
Dažniausios IT VBE klaidos
 Dažniausios IT VBE klaidos Renata Burbaitė renata.burbaite@gmail.com Kauno technologijos universitetas, Panevėžio Juozo Balčikonio gimnazija 1 Egzamino matrica (iš informacinių technologijų brandos egzamino
Dažniausios IT VBE klaidos Renata Burbaitė renata.burbaite@gmail.com Kauno technologijos universitetas, Panevėžio Juozo Balčikonio gimnazija 1 Egzamino matrica (iš informacinių technologijų brandos egzamino
Microsoft Word - Liuminescencija_teorija
 2. BOLOGNŲ OBJEKTŲ LUMNESCENCJA. 2.1 Įvadas. Liuminescencijos reiškinys Daugelis fotofizikinių ir fotocheminių vyksmų yra šviesos sąveikos su bioobjektu pasekmės. Vienas iš pagrindinių šviesos emisijos
2. BOLOGNŲ OBJEKTŲ LUMNESCENCJA. 2.1 Įvadas. Liuminescencijos reiškinys Daugelis fotofizikinių ir fotocheminių vyksmų yra šviesos sąveikos su bioobjektu pasekmės. Vienas iš pagrindinių šviesos emisijos
Kauno menų darželis Etiudas Mgr. Virginija Bielskienė, direktorės pavaduotoja ugdymui, II vad. kategorija, auklėtoja metodininkė Žaidimas pagrindinė i
 Kauno menų darželis Etiudas Mgr. Virginija Bielskienė, direktorės pavaduotoja ugdymui, II vad. kategorija, auklėtoja metodininkė Žaidimas pagrindinė ikimokyklinio ir priešmokyklinio amžiaus ir jaunesnio
Kauno menų darželis Etiudas Mgr. Virginija Bielskienė, direktorės pavaduotoja ugdymui, II vad. kategorija, auklėtoja metodininkė Žaidimas pagrindinė ikimokyklinio ir priešmokyklinio amžiaus ir jaunesnio
PowerPoint Presentation
 Pagrindiniai Lietuvos ateities iššūkiai Klaudijus Maniokas ESTEP valdybos pirmininkas Trys akcentai Pripažinti ir nepripažinti iššūkiai: konsensuso link Struktūrinių apirbojimų sprendimas: intervencijos
Pagrindiniai Lietuvos ateities iššūkiai Klaudijus Maniokas ESTEP valdybos pirmininkas Trys akcentai Pripažinti ir nepripažinti iššūkiai: konsensuso link Struktūrinių apirbojimų sprendimas: intervencijos
Title of Presentation
 Lietuvos pažeistų durpynų tvarkymas, nt Tyrulių paukščių apsaugai svarbių teritorijų (PAST) atkūrimo darbus (www.tyruliai-life.lt) NR. LIFE12 NAT/LT/001186 Parengė: projekto asistentė J. Liaudanskytė projekto
Lietuvos pažeistų durpynų tvarkymas, nt Tyrulių paukščių apsaugai svarbių teritorijų (PAST) atkūrimo darbus (www.tyruliai-life.lt) NR. LIFE12 NAT/LT/001186 Parengė: projekto asistentė J. Liaudanskytė projekto
Techninis aprašymas SONOMETER TM 1100 Ultragarsinis kompaktiškas energijos skaitiklis Aprašymas / taikymas MID tikrinimo sertifikato nr.: DE-10-MI004-
 SONOMETER TM 1100 Ultragarsinis kompaktiškas energijos skaitiklis Aprašymas / taikymas MID tikrinimo sertifikato nr.: DE-10-MI004-PTB003 SONOMETER 1100 tai ultragarsinis statinis kompaktiškas energijos
SONOMETER TM 1100 Ultragarsinis kompaktiškas energijos skaitiklis Aprašymas / taikymas MID tikrinimo sertifikato nr.: DE-10-MI004-PTB003 SONOMETER 1100 tai ultragarsinis statinis kompaktiškas energijos
KTU BIBLIOTEKOS PASLAUGOS
 KTU BIBLIOTEKOS PASLAUGOS K T U B I B L I O T E K A Centrinė biblioteka K. Donelaičio g. 20 1. 2. 3. Cheminės technologijos fakulteto biblioteka Radvilėnų pl. 19 5. 4. Informatikos fakulteto biblioteka
KTU BIBLIOTEKOS PASLAUGOS K T U B I B L I O T E K A Centrinė biblioteka K. Donelaičio g. 20 1. 2. 3. Cheminės technologijos fakulteto biblioteka Radvilėnų pl. 19 5. 4. Informatikos fakulteto biblioteka
Privalomai pasirenkamas istorijos modulis istorija aplink mus I dalis _suredaguotas_
 P R O J E K T A S VP1-2.2-ŠMM-04-V-01-001 MOKYMOSI KRYPTIES PASIRINKIMO GALIMYBIŲ DIDINIMAS 14-19 METŲ MOKINIAMS, II ETAPAS: GILESNIS MOKYMOSI DIFERENCIJAVIMAS IR INDIVIDUALIZAVIMAS, SIEKIANT UGDYMO KOKYBĖS,
P R O J E K T A S VP1-2.2-ŠMM-04-V-01-001 MOKYMOSI KRYPTIES PASIRINKIMO GALIMYBIŲ DIDINIMAS 14-19 METŲ MOKINIAMS, II ETAPAS: GILESNIS MOKYMOSI DIFERENCIJAVIMAS IR INDIVIDUALIZAVIMAS, SIEKIANT UGDYMO KOKYBĖS,
Masyvas su C++ Užduotys. Išsiaiškinkite kodą (jei reikia pataisykite) ir paleiskite per programą. Ciklo skaitliuko įrašymas į vienmatį masyvą: #includ
 ir paleiskite per programą. Ciklo skaitliuko įrašymas į vienmatį masyvą: #includ") Masyvas su C++ Užduotys. Išsiaiškinkite kodą (jei reikia pataisykite) ir paleiskite per programą. Ciklo skaitliuko įrašymas į vienmatį masyvą: #include main() int mas[100]; int k; for (int
Masyvas su C++ Užduotys. Išsiaiškinkite kodą (jei reikia pataisykite) ir paleiskite per programą. Ciklo skaitliuko įrašymas į vienmatį masyvą: #include main() int mas[100]; int k; for (int
DB sukūrimas ir užpildymas duomenimis
 DB sukūrimas ir užpildymas duomenimis Duomenų bazės kūrimas Naujas bendrąsias DB kuria sistemos administratorius. Lokalias DB gali kurti darbo stoties vartotojasadministratorius. DB kuriama: kompiuterio
DB sukūrimas ir užpildymas duomenimis Duomenų bazės kūrimas Naujas bendrąsias DB kuria sistemos administratorius. Lokalias DB gali kurti darbo stoties vartotojasadministratorius. DB kuriama: kompiuterio
Robert Bosch GmbH Dviračių garažas Bikeport Apsauga nuo vėjo ir lietaus. Dviračių garažas Bikeport Jums nusibodo tampyti Jūsų dviratį į rūsį ir atgali
 Dviračių garažas Bikeport Apsauga nuo vėjo ir lietaus. Dviračių garažas Bikeport Jums nusibodo tampyti Jūsų dviratį į rūsį ir atgalios? Jums pagelbės ši pačių pagaminta dviračių stoginė be to, ji puikiai
Dviračių garažas Bikeport Apsauga nuo vėjo ir lietaus. Dviračių garažas Bikeport Jums nusibodo tampyti Jūsų dviratį į rūsį ir atgalios? Jums pagelbės ši pačių pagaminta dviračių stoginė be to, ji puikiai
STATYTOJAS A. Zakaro firma IĮ STATINIO PROJEKTO PAVADINIMAS Inţinerinių statinių Klaipėdos m., Minijos g. 44 B rekonstravimo ir statybos projektas STA
 STATYTOJAS A. Zakaro firma IĮ STATINIO PROJEKTO PAVADINIMAS Inţinerinių statinių Klaipėdos m., Minijos g. 44 B rekonstravimo ir statybos projektas STATYBOS RŪŠIS Statinio rekonstravimas STATINIO KATEGORIJA
STATYTOJAS A. Zakaro firma IĮ STATINIO PROJEKTO PAVADINIMAS Inţinerinių statinių Klaipėdos m., Minijos g. 44 B rekonstravimo ir statybos projektas STATYBOS RŪŠIS Statinio rekonstravimas STATINIO KATEGORIJA
Mechaninės sėjamosios EcoLine, ProfiLine ir MasterLine
 Mechaninės sėjamosios EcoLine, ProfiLine ir MasterLine EcoLine Lengva ir tiksli Ideali mažo ir vidutinio dydžio ūkiams, EcoLine sėjamoji gali būti naudojama tik kaip sėjamoji paskui traktorių arba kombinuojama
Mechaninės sėjamosios EcoLine, ProfiLine ir MasterLine EcoLine Lengva ir tiksli Ideali mažo ir vidutinio dydžio ūkiams, EcoLine sėjamoji gali būti naudojama tik kaip sėjamoji paskui traktorių arba kombinuojama
LIETUVOS JAUNŲJŲ MATEMATIKŲ MOKYKLA 7. PAPRASČIAUSIOS DIFERENCIALINĖS LYGTYS ( ) Teorinę medžiagą parengė ir septintąją užduotį sudarė prof. d
 Teorinę medžiagą parengė ir septintąją užduotį sudarė prof. d") LIETUVOS JAUNŲJŲ MATEMATIKŲ MOKYKLA 7 PAPRASČIAUSIOS DIFERENIALINĖS LYGTYS (07 09) Teorinę medžiagą parengė ir septintąją užduotį sudarė prof dr Eugenijus Stankus Diferencialinės lygtys taikomos sprendžiant
LIETUVOS JAUNŲJŲ MATEMATIKŲ MOKYKLA 7 PAPRASČIAUSIOS DIFERENIALINĖS LYGTYS (07 09) Teorinę medžiagą parengė ir septintąją užduotį sudarė prof dr Eugenijus Stankus Diferencialinės lygtys taikomos sprendžiant
PowerPoint Presentation
 Bibliotekos ištekliai ir paslaugos BIBLIOTEKA Centrinė biblioteka Gedimino g. 50 Mechanikos inžinerijos ir dizaino fakulteto biblioteka Studentų g. 56 Informatikos fakulteto biblioteka Studentų g. 50 Statybos
Bibliotekos ištekliai ir paslaugos BIBLIOTEKA Centrinė biblioteka Gedimino g. 50 Mechanikos inžinerijos ir dizaino fakulteto biblioteka Studentų g. 56 Informatikos fakulteto biblioteka Studentų g. 50 Statybos
JABRA REVO WIRELESS Naudotojo Vadovas jabra.com/revowireless
 Naudotojo Vadovas jabra.com/revowireless TURINYS 1. SVEIKI...3 2. APŽVALGA... 4 3. KAIP DĖVĖTI...5 3.1 AUKŠČIO REGULIAVIMAS 3.2 SULENKIAMI LANKSTAI 4. ĮKROVIMAS...7 4.1 BATERIJOS BŪSENA 5. PRIJUNGIMAS...
Naudotojo Vadovas jabra.com/revowireless TURINYS 1. SVEIKI...3 2. APŽVALGA... 4 3. KAIP DĖVĖTI...5 3.1 AUKŠČIO REGULIAVIMAS 3.2 SULENKIAMI LANKSTAI 4. ĮKROVIMAS...7 4.1 BATERIJOS BŪSENA 5. PRIJUNGIMAS...
Slide 1
 Elektroninių įrenginių gamintojai Apie įmonę V. Bartkevičiaus įmonė Valsena buvo įkurta 1996 Birželio 4 dieną. Pagrindinė įmonės veikla unikalių mikroprocesorinių duomenų perdavimo prietaisų projektavimas
Elektroninių įrenginių gamintojai Apie įmonę V. Bartkevičiaus įmonė Valsena buvo įkurta 1996 Birželio 4 dieną. Pagrindinė įmonės veikla unikalių mikroprocesorinių duomenų perdavimo prietaisų projektavimas
LMTA prenumeruojamos duomenų bazės
 LMTA PRENUMERUOJAMOS DUOMENŲ BAZĖS LMTA PRENUMERUOJAMOS DUOMENŲ BAZĖS EBSCO JSTOR Taylor & Francis Naxos Music Library Grove Music Online (Oxford Music Library) Emerald Management ejournals Collection
LMTA PRENUMERUOJAMOS DUOMENŲ BAZĖS LMTA PRENUMERUOJAMOS DUOMENŲ BAZĖS EBSCO JSTOR Taylor & Francis Naxos Music Library Grove Music Online (Oxford Music Library) Emerald Management ejournals Collection
C(2016)7159/F1 - LT (annex)
7159/F1 - LT (annex)") EUROPOS KOMISIJA Briuselis, 2016 11 11 C(2016) 7159 final ANNEXES 1 to 3 PRIEDAI prie KOMISIJOS DELEGUOTOJO REGLAMENTO kuriuo 2014 m. liepos 23 d. Europos Parlamento ir Tarybos reglamentas (ES) Nr. 909/2014
EUROPOS KOMISIJA Briuselis, 2016 11 11 C(2016) 7159 final ANNEXES 1 to 3 PRIEDAI prie KOMISIJOS DELEGUOTOJO REGLAMENTO kuriuo 2014 m. liepos 23 d. Europos Parlamento ir Tarybos reglamentas (ES) Nr. 909/2014
Projektas PATVIRTINTA Alytaus Sakalėlio pradinės mokyklos direktoriaus įsakymu Nr. V- ALYTAUS SAKALĖLIO PRADINĖS MOKYKLOS ELEKTRONINIO DIENYNO T
 PATVIRTINTA Alytaus Sakalėlio pradinės mokyklos direktoriaus 2019- įsakymu Nr. V- ALYTAUS SAKALĖLIO PRADINĖS MOKYKLOS ELEKTRONINIO DIENYNO TVARKYMO NUOSTATAI I SKYRIUS BENDROSIOS NUOSTATOS 1. Alytaus Sakalėlio
PATVIRTINTA Alytaus Sakalėlio pradinės mokyklos direktoriaus 2019- įsakymu Nr. V- ALYTAUS SAKALĖLIO PRADINĖS MOKYKLOS ELEKTRONINIO DIENYNO TVARKYMO NUOSTATAI I SKYRIUS BENDROSIOS NUOSTATOS 1. Alytaus Sakalėlio
1 k. BUTAS Vilniaus m. sav., Šnipiškės, Žalgirio g. Tadas Dapkus tel
 1 k. BUTAS Vilniaus m. sav., Šnipiškės, Žalgirio g. Tadas Dapkus tel. +370 650 41 890 Dapkus@vilniaus-turtas.lt Objekto informacija Objektas BUTAS Adresas Vilniaus m. sav., Šnipiškės, Žalgirio g. Plotas
1 k. BUTAS Vilniaus m. sav., Šnipiškės, Žalgirio g. Tadas Dapkus tel. +370 650 41 890 Dapkus@vilniaus-turtas.lt Objekto informacija Objektas BUTAS Adresas Vilniaus m. sav., Šnipiškės, Žalgirio g. Plotas
UAB Utenos šilumos tinklai (šilumos tiekėjo ir (ar) karšto vandens tiekėjo pavadinimas) įm.k , PVM mokėtojo kodas LT , Pramonės g. 11
 karšto vandens tiekėjo pavadinimas) įm.k , PVM mokėtojo kodas LT , Pramonės g. 11") UAB Utenos šilumos tinklai (šilumos tiekėjo ir (ar) karšto vandens tiekėjo pavadinimas) įm.k.183843314, PVM mokėtojo kodas LT838433113, Pramonės g. 11, LT-28216 Utena, tel. (8 389) 63 641, faks. (8 389)
UAB Utenos šilumos tinklai (šilumos tiekėjo ir (ar) karšto vandens tiekėjo pavadinimas) įm.k.183843314, PVM mokėtojo kodas LT838433113, Pramonės g. 11, LT-28216 Utena, tel. (8 389) 63 641, faks. (8 389)